


Celý minulý měsíc jsme probírali otázku blbuvzdornost robotů a pojmy jako filtrace napájení a ochrana proti přepóliování tam jenom pršely. Filtraci napájení jsem už kdysi dávno probral, takže zbývá už jenom ochrana proti přepólování.
školním pohledem vzato můžeme ochranu proti přepólování třídit na Aktivní, pasivní, sériovou, paralelní, destruktivní, nedestruktivní a kdoví jak ještě, ale to všecho je moc složité, tak to rozdělíme na dvě kapitolky
- Mechanická ochrana alias - Nepřepólovatlené konektory
- Elektronická ochrana alias obvody, které prežijí přepólování.
Dnes jsou tedy na programu konektory.
Nejjednodušší obranou proti přepóliovaní konektrou je samozřejmě taková konstrukce konektoru, které mechanicky vylučuje zasunout jej špatně. Tomu vyhovují známé (a hnusné) konektrory z fastonů pro auta a celá řada dalších konentorů je udělána tak, že nejde "zasunout opačně"
 DO důsledku dovedená blbuvzdornost dokonce vyžaduje, aby pro každý účel byl použít jiný konektor - tedy napájení jiný konektor, vnitřní sběrnice jiný konektor, každé čidlo svůj typ konektoru atd.
DO důsledku dovedená blbuvzdornost dokonce vyžaduje, aby pro každý účel byl použít jiný konektor - tedy napájení jiný konektor, vnitřní sběrnice jiný konektor, každé čidlo svůj typ konektoru atd.Tento požadavek je krásný a určitě snižuje zmetkovitost na lince, kde negramotní indové montují Hi-Fi věže SONY, ale pro robotiky je nepraktický, jednak protože by se mohlo stát, že budete hledat 20 typ exotického konektoru, který jste ještě nepoužíli a navíc robot není nikdy hotov. Vždy je to rozestavěné staveniště, na které se "až bude čas" pověsí další moduly.
Proto robotici s oblibou používají konektory do jisté míry univerzální - většinou typu "pinová lišta" - tedy řádka pinů která se zapáji do desky a později se k ní vyrobí náležitý "protikus" Vlastnotí konektorů typu pinová lišta je symetrie podle osy - takže nic nebrání zapojit konektor opačně. Přesto i takové konektry se dají udělat "Blbuvzdorně" a to tak že při opačném zapojení sice daný modul nefunguje, ale alespoň neshoří.

Jak se to dělá bych ukázal na nejjdenodušším konektoru v robotech - konektoru pro servo
Jenom pro představu si vezmeme špatné zapojení , které v případě servo-konektoru by vypadalo takto : Zem na jenom krajním pinu, napájení na druhém krajním pinu a signál uprostřed - při otočení takového konektoru se zem zkratuje na napájení a naopak a je konec ...
Proto mají serva konektory signálový pin na kraji - pokud zapojíme konektor obráceně - střední pin vždy zůstane zapojený správně a jediné co se staně je že se nám na vstup serva připojí (podle druhu konektoru) buď napájen, nebo zem což ochrané obvody vstupu serva musí vydržet.
Na střední pin, který je v obu polohách zapojen správně je lepší zapojit zem, pro případ že by vaše elektronika byla přes kostru robota spojená se zemí ještě někde jinde, takže Airtronics má lepší konektory pro serva než Futaba, ale to je jenom detail.
Jinými slovy- už v okamžiku návrhu rozložení pinů v konektoru musíte počítat se zapojením "obráceně". U konektoru s lichým počtem pinů prostřední pin je vždy zapojen správně, proto je vhodné na něj dát zem a zrcadlově obráceně proti napájení je vhodné dát buď nezapojený pin, nebo nějaký vstup, s ochranným odporem, který snese plné napájecí napětí.
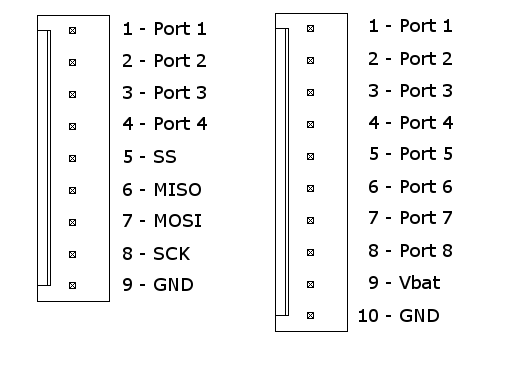
Příklady, které by ani při přepólování neshořely vidíte na obrázku, vlevo sice není na středním pinu zem, ale to by nemuselo tak vadít.
Nicméně jako univerzální radu bych dnes dal - nenechávejte rozložení pinů na náhodě, a vždy si na kus paíru nakreslete rozložení pinů na zásuvce i zástrčce, vystřihněte nůžkami s "virtuálně" zkuste zapojit obráceně "co by se stalo". Jako vždy v otázkách blbuvzdornosti - 5 minut navíc ušetří mnoho hodin "blbé nálady" nad spáleným robotem.
Dnešní rada pro brunety zní - pokud je robotik zaujatý robotem - striptýz ve dveřích robotické pracovny jej sice vytočí do vysokých otáček, ale často ne v tom správném směru. Neberte to jako své selhání, pokud se vám jedná především o sex - svalovců bez mozku je přece všude plno ....
Zas tím sexem jde vyrobit dokonalejší robot, než vznikne pod tvou páječkou. To chce kompromis, nechat si ho vykouřit při pájení robota :-D