Rok se s rokem sešel a zítra máme Silvestr. Nicméně nutkání psát blog pravidelně, se mi stalo železnou košilí, proto ani dnes se nebudeme zabývalt chechtáním a chlastem, ale probereme možné "slepé cesty" v konstrukci amatérských mobilních robotů.

Kdyby záleželo na mně tak bych nejraději nedělal nic jiného než vyráběl netradiční analogová čidla a zbytek konstrukce robota, a zejména programování nechal někomu zkušenějším. To mimochodem myslím zcela vážně, takže pokud vám naopak chybí někdo, kdo by vyráběl analogovou elektroniku "hlaste se na mé stále adrese".
Když se podíváme na roboty v Česku je to trochu smutné, protože všechno je kopírování kopírovaného a jen vzácně se vyskytne "blázen" v pozitivním sova smyslu jako je Béda Himmel a postaví Robota koulíčka. Stejné "sucho jako na poušti" vidím i v oblasti čidel. Používají se mizerné sonary typu SRFxx, Infračervené "Sharpy" typu GPYxxxx, laserová čidla od SICKU za hříšné peníze a sem tam nějaké IR optočleny na detekci čáry nebo tak.
Proto bych dnes začal poněkud fantazírovat nad čidly, které jsem doposud nepostavil, ale už jsem o pokusech s nimi četl a vypadají nadějně.
1. "Ultrazvuk" na akustické frekvenci. Ultrazvukové mikrofony jsou citlivé jenom v tak úzkém úhlu jak to jenom jde - to komplikuje používání stereofonních ultrazvuků. Piezzo reproduktorky uzčené pro pásmo kolem 4 kHz krásně kmitají i na své "třetí harmonické" kolem 12khz - toho se dá využít pro náhradu ultrazvuku zvukem - má to ale své problémy, jako je nutnost filtrace signálů (zvukové mikrofony jsou citlivé na široké pásmo, nejenom na 40 +-1 kHz).
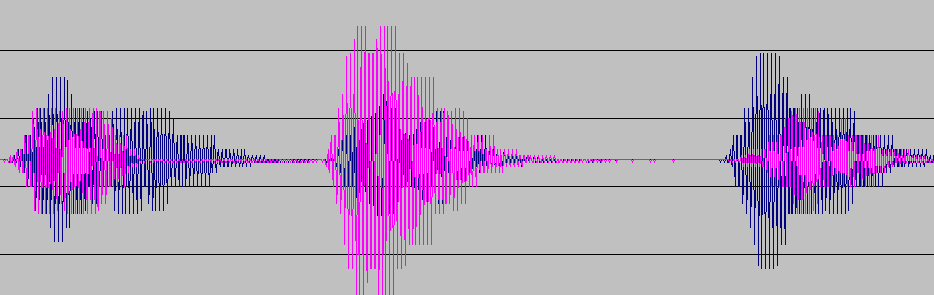
2. Stereofonní ultrazvuk pro blondýny - použije se taková frekvence zvuku (ultrazvuku) aby oba mikrofony byl 1/4 vlnové délky od sebe. Pak se signál z levého mikrofonu mixuje se signálem z pravého a stejnosměrné napěti, které tak vzniá je přímo úmerné azimutu překážky - lze si představit něco jednoduššího ?
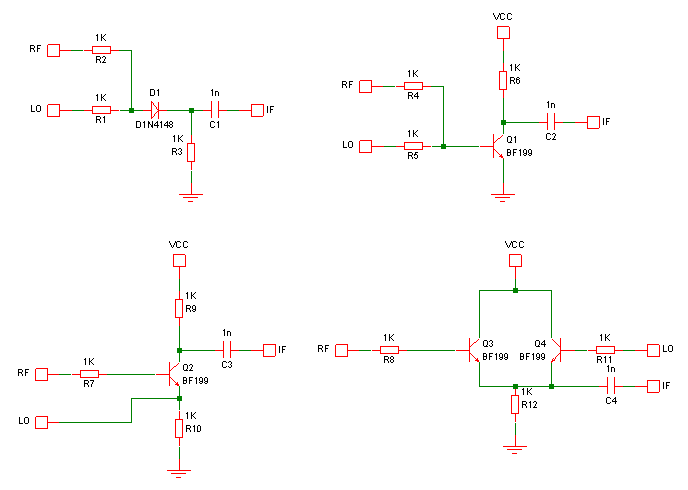
3. Měření rychlosti robota dopplerem - a to buď radiovým, nebo ultrazvukovým dopplerem - v obou případech je princip stejný - vysílá se vlnění (zvukové /radiové) pod úhlem 45 st k zemi- Odražená frekvence se mixuje s vysílanou a "rozdílová" frekvence je přímo úměrná rychlosti. Tento systém velice dobře znají američní farmáři, kteží dávkují osivo a hnojiva podle rychlosti traktoru a měření přes kola nelze kvůli prokluzování v blátě použít ....
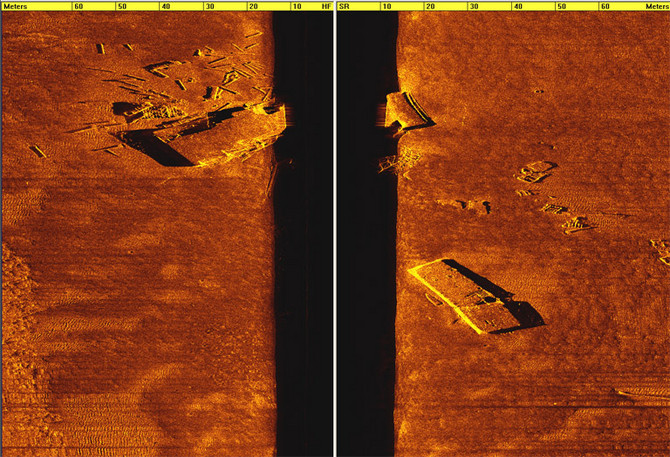
4. Side scanning ultrazvuk ultrazvuk pípá pod úhlem 45 st dolů z robota a do strany a všecha echa se "zakreslují" do obrázku na kterém by měly být vidět okraje cesty.
5. Sluneční kompas - máte kruh svisle postavených fotodiod, na některé svítí slunko, jiné jsou ve stínu podle intenzit určíte azimut ke slunci.
Další mě momentálně nenapadají, ale jestli "se dožiju", určitě všechno tohle a mnoho jiných věcí vyzkouším a budu informovat.
Přeji spokojený nový rok a dodávám už jenom radu pro blondýny: Pokud se vám v autobuse chlap po očku dívá do očí - je to v pořádku - patrně by vás rád oslovil ale stydí se. Pokud se vám dívá upřeně do výstřihu - je to taky v pořádku, proto jste si přede tu pus-upku brala. Pokud vám ale upřeně hledí do klína - je to průser, patrně vám legíny prosvítají a on usilovně počítá chloupky "na pipině" - nezapoměňte si příště vzít přes legíny sukni ...