


Na robotickém dni roku 2005 jsem se rozhodl, že robotického dne roku 2006 se budu účastnit jako soutěžicí v kategorii Mini-SUMO. To jsou roboti s maximálním půdorysem 10x10cm maximálně 500 gramů těžcí, kteří se vytlačují z kruhové arény. Aréna je černá a má bílý okraj, aby podle barvy pod sebou roboti poznali, že už jsou na kraji.
Sumo zápasy v roce 2005 vypadaly tak že jeden robot se motal na jednom konci hřiště a druhý se motal na druhém a neměli o sobě ani ponětí. Takže jsem hledal způsob jak přesně změřit polohu soupeře. Tehdy se běžně používaly Infračervená čidla, která dají informaci jestli je soupeř vlevo nebo vpravo, ale to se mi zdálo málo. Tak jsem se inspiroval u netopýrů a začal stavět "Stereofonní ultrazvuk"

Pokud se podíváte na mého robota "Helenu" z té doby - bude vám to jasné. Uprosřed je ultrazvukový reproduktor a po stranách dva ultrazvukové mikrofony. Takže ultrazvuk pískne a pokud je protivník více vlevo - odražené ECHO dorazí na levou stranu dříve než na pravou a podle časového rozdílu mezi levým a pravým kanálem poznám nejenom vzdálenost soupeře, ale i směr. Na začátku zápasu se 5 sekund čeká, během těch 5 sekud si moji roboti soupeře zaměřili a pak už "si pro něj jeli" zcela přesně na místo kde byl .... Fungovalo to báječně, ale nakonec jsem se stejným bodovým ziskem jako vítěz skončil 2, protože jsem prohrál vzájemný zápas, protože Pepa Hanzal měl pro Barborku silikovnové pneumatiky, které já jsem ještě neměl. (Přesněji řečeno jsem z furiantství nad "dominancí své technologie" odmítl jeho nabídku si je přímo na místě koupit¨...)
Je zajímavé, že špatné zkušenosti s čidly typu SRFxx jsou natolik zažité, že když jsem předem oznámil, že pracuju na této technologii - dostalo se mi jasné rady "neplýtvej časem, je to nemožné". Zejména zaznívala námitka, že nebudu schopen měřit soupeře, kteří jsou blízko, což se ukázalo jako nesmysl, protože nakonec jsem měřil překážky až do 5 cm před robotem. Abych se vyhnul problémům s usměrňováním odraženého signálu diodami. (usměrňování milivoltových signálů je vždycky velice bolestivá záležitost) tak jsem vymyslel "přímou digitalizaci" UZ signálu, kterou jsem vysvětloval minule. Problém byl v tom, že při 2 kanálech musely mé AD převodníky pracovat na frekvenci 320 kHz a to už na ATmegu8 na 16 MHZ je celkem dost. Zajímavé, je že jsem každý vzorek musel zpracovat během 50 Strojových cyklů (16 MHz / 320 kHz = 50) což se samo o sobě zdálo nemožné, ale v Assembleru to celkem šlo.

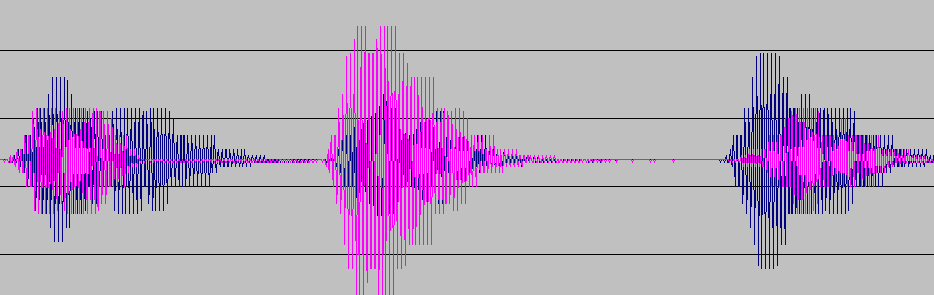
Jak tedy systém fuguje ? Myslím, že je to jasné. Po identifikaci soupeře v pravém i levém kanále získám vzdálenosti - vlevo DM+DL a vpravo DM+DR- pak průměr je úměrný vzdálenosti a rozdíl je úmerný azimutu. Viz středoškolská matematika, Pythahorova věta atd. Tohle platí v případě, že máme v "zorném poli" jenom jednu překážku. Pokud máme v zorném poli více překážek vypadají signály z čidel třeba takto.
Pak můžeme prostor kolem robota rozdělit na síť souřadnic a pro každý bod v této síti můžeme násobit dané vzdálenosti odpovídající signály z levého a pravého mikrofonu a můžeme sestavovat "mapy ultrazvukové odrazivosti", které v simulaci v Excelu vypadají třeba nějak takto.

Robot je pochopitelně uprostřed levé přední strany. To že jsou ultrazvuková echa rozmazaná v čase se projeví tím, že překážky jsou poněkud roztahané do šířky (určení azimutu je náročnější než určení vzdálenosti). I tohle se dá udělat s jednoduchoučkým hardwarem z minula (pochopitelně doplněným o druhý přijímací kanál).
Stačí jenom signál plný informací neznehodnotit v zesilovačích a nakonec neposlat do ubohého komparátoru. Na druhé straně když chcete dělat ultrazuvk takto - je to mnoho programování a přemýšlení a není to nic pro nevzdělance, který se cítí jako "veliký hacker" protože umí třemi drátky připojit "SRF05 k Arduínu".
Zbývá už jenom tradiční rada pro blondýny, co dočetly až sem : Pamatujte, že jehlové kozačky se na náledí nehodí. Pokud však upadnete šikovně a s nohama ve vzduchu "tomu správnému" ukážete, co máte pod sukní - neznám lepší způsob jak si ještě před vánocemi rychle opatřit chlapa.
Zajímavé heblo v pozadí, to je trávoměr?