


Takže abych jenom nechválil probereme dneska problémy (a možnosti) stereofonního ultrazvuku.
Pokud si koupíte SRF04 tak vůbec nemusíte řešit jestli existuje nějaký přeslech mezi reproduktorem a mikrofonem, protože mikrofom je prostě zcela ohlušen, a navíc analogový procesing je v SRF tak mizerný, že je to stejně jedno.
Pokud máte sterofonní ultrazvuk už to tak jedno není. Pokud by oba mikrofony slyšely totéž - pak se stereofonní ultrazvuk mění v monofonní a nemusíme se párat s druhým kanálem a digitálním zpracováním. Zkušenost mi však ukázala, že mezi kanály (zejména pokud jsou mikrofony připájené na jednu desku) existuje přeslech. Nevím jestli se to dá vysvětlit takto, ale celý systém na mně působil dojmem, že odražené echo rozechvívá nejenom mikrofon ale, i plošný spoj, ve kterém se šíří rychleji než ve vzduchu a tím nám kazí informaci o azimutu. Jako kompenaci jsem lepil mikrofony silikonem a pájel je drátky, což dosti pomohlo, přesto mám v poslední verzi připravené samostatné předzesilovače, které se k robotu přilepí pomocí kousků molitanu.
Druhý problém - snahou výrobců ultrazvukových mikrofonu a reproduktorů je vyrobit je s co nejužším úhlem vyyzařování - protože uživatelé modulů typu SRFxx mají představu "paprsku" který vyzařuje ze SRF. Co monofonnímu ultrazvuku prospívá to stereofonnímu ultrazvuku škodí. U reprodukroů není problém - umístíme je do kruhu a budíme je stejnou fází - tím nám podle Huygensova principu vznikne jeden "virtuální" reproduktor uprostřed kruhu, ale mikrofony ? - pro ty byla nejlepší s úplně kruhová charakteristika citlivosti (stejně citlivě ve všech směrech). Pokud tomu tak není může sonar slušně pracovat jen v oblasti, kde se citlivosti mikrofonů překrývají. Tím se konstruktér dostává do neřešitelného rozporu - pro zvýšení přesnosti měření azimutu by potřeboval mikrofony co nejdál od sebe, tím se mu ale zmenšuje oblast překrytí jejich ciltlovosti.
Mikrofony s kruhovou charakteristikou - jsou běžné v akustickém pásmu, takže už mám doma v šuplíku několik piezo repráčků, které pěkné pískají na 18kHz a zkusím udělat sonar v aktustickém pásmu - je otázka jestli to pak nebude "zvukar" nebo "pískar"
Poslední problém - pokud digitaliujete dva kanály - nemůžete měřit AD převodníkem oba kanály naráz - takže máte signál z jedné strany nepatrně zpožděný. Světe div se, ale je to cítit, - stereofonní ultrazvuk nepatrně "šilhá" - což není nic, co by se nedalo kompenzovat.
No a teď ty možnosti:
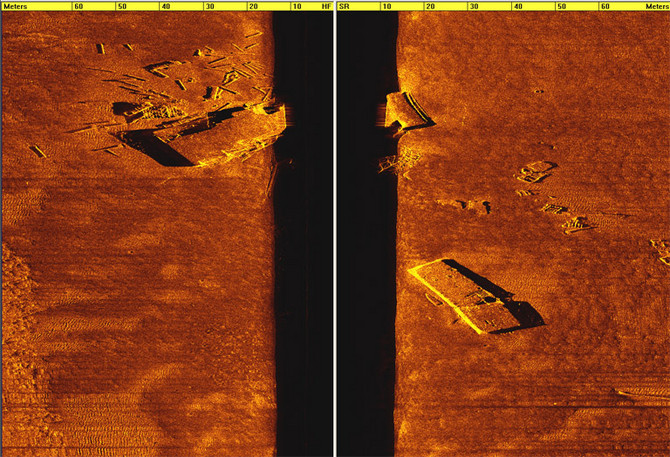
Mapování ultrazvukem jsme už probrali, ale celou soustavu dvou repráčků a mikrofonu můžete postavit svisle a sledovat oblast vedle jedoucího robota ve stylu Side scanning sonaru, který se používá k mapování mořského dna. V akustickém pásmu a ve vzduchu to snad ještě nikdo ani nezkoušel, a já sám s timhle počítám jako s variantou pro Robotour, jestli (vysoce pravděpodobně) nebude Trávoměr fungovat podle mých představ. Tak ne abyste mě předběhli !!!
Pokud už musíte nebo chcete používat obyčejný "monofonní sonar" můžete druhý kanál využít, pokud násobíte data z levého kanálu daty z pravého - vznikne tím sonar s extrémně úzkopásmovou charakteristikou - citlivý jenom na předměty, které jsou striktně v ose. Pokud budete vzájemně násobit kanály nepatrně časově posunuté - získáte maximální citlivost v takovém úhlu, který odpovídá zpoždění mezi kanály - to je varianta Phased array radarů, které mají stovky antén, vyzařují i přijímají z takového směru, podle zpoždění signálu mezi anténami, aniž by se radar musel pohnout.
V otázce ultrazvuku by to bylo všechno. Jelikož jsem nezveřejnil polopatistický návod jak si sonar postavit včetně softwaru a nepřinesl to hotové na stříbrném podnose - asi zůstanete u SRF05, ale já považuju svojí povinnost informovat vás o "jiném světě" v oblasti ultrazvuku za (prozatím) splněnou.
Zbývá ještě tradiční rada pro blondýny, které dočetly až sem : Je určitý rozdíl jestli trávíte vánoce v posteli rozžhavená svým miláčkem, nebo horečkou při chřipce. Je však pravda, že obojí bohužel / naštěstí jednou přejde.
Přeji veselé vánoce všem čtenářům.