


Když robotik čte modelářský časopis - nemůže se ubránit jistému pohrdání - pchá - "špejličkáři", co z pěnovky, horkým drátem, vyřezávají letadýlka. Nicméně čím jsem starší - tím je tento pohrdavý postoj slabší a pokud vídím chaos současné "hobby robotiky" tak nemohu než žasnout nad průhlednou jednoduchostí a obdivuhodnou vzájemnou kompatibilitou současné modelářské elektroniky.
Tedy každý robot má čidla, mozek, motory. Každé polystyrénové letadlo nemá nic z toho jenom (servo)motory. Čidla a mozek má "páníček v hlavě". V době letadel "benzíňáků", které ve skutečnosti lítaly spíše na methanol a nitromethan to byla 100% pravda, ale pak se v leteckém modelářství objevil elektrický pohon, s elektrickým pohonem se objevily helikoptéry, trikoptéry, kvadrokoptéry, hexakoptéry a jiné multikoptéry a najednou se obrovská propast mezi složitostí robotů a primitivismem "letadélek" začala stírat.
Jak tedy vypadá taková multikoptéra - protože lidské reflexy nestačí na to, aby se taková věc udržela ve vzduchu - je na palubě počítač - často s AVR nebo nějakým menším ARMem. Tomu dodáva data "inertial navigation unit" což v dnešní době je miniaturní jedno až dvoučipová deska, která obsahuje tříosý gyroskop, velmi často i tříosý akcelerometr a občas i tříosý magnetometr - jako kompas. ARM dodává data do motorů a jenom "tak pomimo" tam sedí i příjímač dálkového ovládání vysílačkou k jehož povelům ARM "přihlíží" při řízení všech vrtulí.
Jak tedy vypadá robot ? neuvažujeme - li chudáka, co tahá na zádech izolepou přilepený laptop - tak téměř stejně jako multikoptéra - pár desek s AVR / PIC / ARM, čidla , motory, často i dálkové ovládání, k jehož povelům procesor "přihlíží".

Podstatný rozdíl je ale v tom, že zajdete do modelářské prodejny a koupíte "servomotory", hlavní motory, přijímače, akcelerometry, gyroskopy, mixéry, telemetrické moduly, a já nevím co ještě. Od Štědrého dne do Štěpána to sestavíte dohromady a na Nový rok můžete letadélko jít na louku rozbít. (Téměř) všechno totiž na sebe sedí - vše je spojeno třípinovým "futaba konektorem" a "fuguje ihned po zapnutí".
Naopak pokud pokud máte ambici postavit tímto "nakupovacím způsobem" robota velice spláčete nad výdělkem, protože koupíte milion zcela mrtvých modulů, které si musíte naprogramovat sám, od vánoc až do léta se budete topit ve zdrojových textech stažených z internetu a budete propadat naprostému zoufalství kolik v nich bude řádečků typu
;TODO sonar sensor support not implemented yet
Princip snadnosti modelářské elektroniky je totiž v tom, že její základ "futaba konektor" a "protokol" který tento konektor přenáší se táhne někam do velmi dávné (a temné) minulosti - někam k elektronickému řízení protiletecké palby ve 40 letech a k řízení balistických raket v 50 a 60 letech.
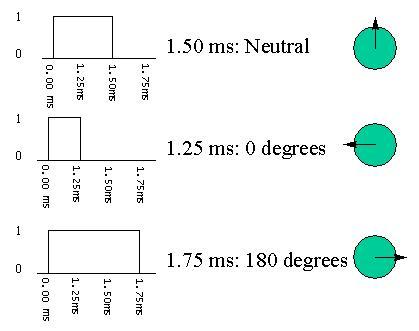
Vlastně jediný standardní "modelářský protokol" je "servopuls" - po datovém drátě futaba konektoru se 50x za sekundu prožene puls jehož délka určuje polohu serva 1,5 ms je střed. Zprostředkovaně vlastně tento puls může přenášet (a v elektroletech a multikoptérách i přenáší) jakoukoliv číselnou hodnotu.
Zdá se vám to primitivní ? Takový "mixér výchylek" ale zase tak primitivní není - do něj vstupují dva "futaba konektory" - řekněme výškovka a směrovka. a ven lezou 2 servopusly pro "V-tail" - mixér tohoto typu pak realizuje rovnici
Levý V-tail = výškovka + směrovka
Pravý V-tail = výškovka - směrovka
Zdá se vám to málo ? Piště si, že je to dosti a hlavně - za 30 let bude stejný mixér z letošní sezóny fungovat stejně dobře a nekomplikovaně jako funguje dnes - vysoce pravděpodobně i s budoucím vybavením...
Když to rozebereme ještě podrobnějí - každý komponent typu "mixéru výchylek" se dnes realizuje pomocí mikrokontroléru, který měří délku přicházejících pulsů - s různou přesnotí obvykle 8 bitů ale dnes už i 10-12 bitů, tomu odpovídá i přesnost výstupu. To vypadá jako značná ubohost, ale díky primitivní jednoduchosti "servopulsu" se dají propojit komponenty, které od sebě dělí desítky let od doby vzniku, celá zeměkoule geografické vzdálenosti a původní konstruktér ani v nejdivočejších snech netušil k čemu budete jeho "dítko" chtít připojovat.
Pokud bychom my robotici chtěli "reformovat letadélka" - první problém, který by vznikl by bylo - "čím nahradit servopuls". A z toho by vyplývaly další problémy - jako jsou různá "overengineered" tedy "překonstruovaná" řešení. Takže nakonec by "letadélko" skončilo jako monstrum kde data z příjímače by šla přes WIFI , Ethernet, USB, RS485, CANBUS, všude by bylo milión modulů typu "překladač protokolu" a v softvéru hlavního mikrokontroléru by bylo
;TODO točení vrtulí zatím není implementováno....
Proto koupit "letadélko k vánocům" je dětsky snadné a závislé jen na množství pěněz. Zatímco koupit "robota k vánocům" je složité, protože buď koupíte zcela uzavřenou čínskou "hračku pro imbecily" nebo za veliké prachy koupíte polotovar s malou šancí jej rychle zprovoznit.
Vážení robotici - moc se nečilte, a raději přemýšlejte, jak vymyslet něco tak geniálně jenoduchého a nadčasového jako je "servopuls na futaba konektoru", a vyhnout se při tom mrtvým vodám "čtyřdírkového systému"
Pro dnešek končíme - zbývá už jenom oblíbená rada pro blondýny - sice platí - "v dubnu si musí blondýna vrznout, i kdyby jí měly vaječníky zmrznout", ale ráno je pořád chladno - tak tu déku (mini)sukní ještě jednou promyslete.
Taky to s těmi pulsy není úplně jednoduché, každý přijímač, servo i regulátor reagují trochu jinak (mapř. pulsy 0.75 - 1.0 - 2.25), nová digitální serva jdou dokonce programovat i kalibrovat (regulátory prakticky totéž)... ale co jsem chtěl napsat je, že článek mi muví z duše a je pěkně (čtivě) napsaný. Už je to všechno dávno jeden svět, modeláři používají procesory, robotici serva a elektronici si kupují stavebnice toho všeho...a to je dobře. Jsme na jedné lodi a bavíme se :-)