


Když v listopadu 2003 moje tehdejší manželka prchla za anabolikovým bezmozkem z posilovny i s 1,5 letou dcerou - byl jsem tak nějak "down", proto mě velice potěšilo, že lidi, kteří jsou dnes bez výjimky kámoši, uspořádali v dubnu 2004 první "veřejný" Robotický den.
Na robotickém dni byla spousta pozoruhodných robotů a taky spousta pozoruhodných jevů "mezi nebem a zemí". Příklad - nějací kluci měli elektroniku pro robota v obalu od videokazety (ví mládež co to je ?) Když měli obal otevřený - robot fungoval jako z partesu, když obal zavřeli - robotovi se asi tak po 2 sekundách "kousnul" jeden z procesorů a bylo vymalováno. Když jste se podívali dovnitř videokazety tak to bylo jako břicho mrtvého bezdomovce při pitvě - neskutečný chaos drátů na kterých visely jednotlivé "čtyřdírkové moduly". Tak jsem se ptal - jakou sběrnici používají - a dostalo se mi odpovědi, že se jim jako nejsnazší jevilo použít I2C. Když jsem se ptal proč I2C tak jsem se dověděl, že to je sběrnice, na kterou se nejsnáze "věší" další moduly.
Rozluštění pohádky jistě tušíte - když se dráty nacpaly do zavřeného obalu nastala "nežádoucí vazba" mezi nimi a bylo vymalováno. Protože sběrnice I2C je opravdu "svůdná" - nebo "ve své době" svůdná byla, protože zdánlivě řeší vše - adresování modulů, konflikty na sběrnici atd. Proto jsem vydal "Kubáčovo imperativní nařízení" které si teď tréningově zopakujeme :
ABSOLUTNĚ ZAKAZUJU POUŽÍVAT I2C MIMO JEDNOTLIVÉ DPS A I NA DPS NE NA VĚTŠÍ VZDÁLENOST NEŽ 5 CM!!!
Tušítě proč ? Přesně k tomu totiž bylo I2C vymyšleno - aby usnadnilo routování desek televizorů na dálkové ovládání v 80 letech. tehdy spojovalo přijímač IR, kanálový volič, a ještě "ten třetí šváb", který nastavoval analogové parametry jako hlasitost, výšky basy, kontrast, a barevnou sytost. - Nic více - žádné tahání kabelem na metry daleko, kolem motorů.
Tím samozřejmě vyvstala myšlenka vymyslet něco jiného - a tak jsme dělali "brainstorming mailem". Já jsem křičel - "vymyslete cokoliv, ale ať je to diferenciální sběrnice", kvůli odolnosti proti rušení. Bezstarosťák křičel "hlavně ať to není RS 422 / 485" - protože tam se musí předem přepínat vysílání / příjem. Tak nakonec vznikla idea na RobBus - použije se hardware pro CANbus, ale budeme používat vlastní protokol: RobBus by nikdy nepřekročil práh "kecání na Internetu", kdyby se jí nechytlo duo Kamil + Beřich kteří ji dotáhli do stádia, kdy jí používají ve svých robotech.
Potud lze RobBus považovat za ověřenou "hotovou věc". ´Já jsem už byl mnohokrát nalomen jej taky použít (všechny moduly z mé dílny jsou z hlediska hardwaru připraveny), ale ať jsem počítal jak jsem počítal - pořád mi nevycházela přenosová kapacita, zejména s ohledem na moji ideu posílat ze sonarů do PC celé "mapy ultrazvukové odrazivosti". K tomu směřovala i snaha o naprogramování jednoduché ztrátové komprese atd. Robbus je totiž z principu Simplexní / Poloduplexní sběrníce a navíc "všichni slyší všechny" včetně toho, že každý modul "slyší sám sebe" - což třeba převodníkům USB / RS232 pro PC nedělá 2x dobře.
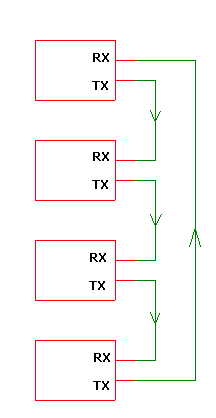
Tak jsem přemýšlel nad "procesorovými sonary" kdy kažý mikrofon bude mít vlastní procesor, který udělá preprocesing. Vymýšlel jsem Robbusové SWITCHE a HUBy a pořád mi z toho vycházely věci - více méně monstrózní. Mezitím jsem přemýšlel nad tím, jestli by nestálo za to Robbus úplně opustit a místo něho se vrátit k RS 232 (a obětovat robustnost diferenciální sběrnice). Vymýšlel jsem jak spojit více RXD a TXD pinů navzájem až najednou PINK - sedím ráno na záchodě a "je to tady".
Nejsou přece jenom sítě typu "sběrnice" nezanedbatelnou část historie se používaly sítě typu "kruh". Dodnes se používá SPI, z historie je známý Token Ring, nebo ARCnet. Takže idea je následující - data se po sběrnici nešíří pasivně, ale aktivně, každý modul dostane paket, co potřebuje si ponechá a zbytek "přepošle" dál. Master se navenek chová stejně, akorát místo neustálého kroužení starého packetu - nahradí tento novým. Tohle může fungovat na úrovní packetů, ale z hlediska softwaru i propustnosti sběrnice je lepší tohle dělat na úrovni bytů. tím že kruh je tvořen full-duplexními úseky komunikační rychlost celé sítě modulů rovná se rychlosti komunikace s jedním modulem. S počtem modulů roste zpoždění mezi vysláním dotazu a přijetím odpovědi, ale u praktického počtu modulů v robotech ( do 10 ) by se s tím (snad) dalo žít.
V čem může být nevýhoda - jedná se o sériové spojení v pravém slova smyslu - tedy vypadne vám odněkud konektor a je po ptákách. Proto zase pro změnu přemýšlím, že "hlavní rozbočovač" by měl nějakou detekci této situace. Na druhé straně master má schopnost detekovat že se packet nevrátil....
Nevím nevím - nabízím tuto ideu jako myšleku (jistě už známou všem zkušeným) - jak pomocí UARTu spojit více než dva moduly. V ostatních oblastech je to stále ve stadiu spekulací aneb jak říkal Doktor FAST - "kdo nejvíce - myslí nejméně ví" ...
Tedy idejí bychom měli dosti - zbývá ještě tradiční rada pro blondýny : Víte jak dopadla moje exmanželka ? Po 10 letech a dalších 2 dětech se svalovec z fitka sebral a šel "o dům dále" - za blondýnou v minisukni - takže pozor ! "Lehce nabyl - lehce pozbyl" funguje i této oblasti.
Jakou komunikační rychlost potřebuješ a na jakou vzdálenost? Já tahám v zarušeném prostředí poblíž velkých motorů RS485 na cca 100m rychlostí 115200bps a bez problémů. Přepínání směru není až takový strašák jak se zdá.