


Kdysi jsem ostře protestoval proti robotům, kteří si "na zádech nesou laptop" a tvrdil jsem AVR zmákne všechno. Pak jsem zabrousil mezi 2D sonary a složitá čidla a můj názor se najednou změnil na "je třeba na palubu dostat co největší výpočetní výkon" a zároveň jsem vždy tvrdil "serverovou farmu do robota ne". To zánlivě směřuje k nějaké schisofrenii, ale spíše to berte tak že s roboty je ta potíž - stejná jakou řeší matička příroda se zvířátky - že totiž na palubě by opravdu mělo být "co nejvíce výpočetního výkonu" ale zase jenom tolik aby robot své počítače unesl a (bateriem) uživil.
Takže jsem své roboty dlouho - a vlastně dodnes stavěl kolem procesorů Atmel AVR a jako správný vidlák, který vše staví kolem vidlí, tak de facto ATMega8 mi stačila dodnes a když jsem potřeboval "opravdu rychlý procesor" tak jsem použil ATmega88, která má povolen takt až do 20MHz.
Kolem těchto procesorů jsem si postavil, co dneska frikulíní označují jako "ekosystém" tedy mám své programátory své převodníky RS232 na ladění, své "blinkenlichen" - LEDky kterými roboti dávají najevo své vnitřní stavy atd.
Jenomže dneska mám ambice postavit svého (posledního ?) velkého robota - a tam už AVR nedává příliš smysl. Lépe řečeno v rámci odladitelnosti celého systému dávají AVR smysl jako inteligentní periferie nějakého centrálního počítače.
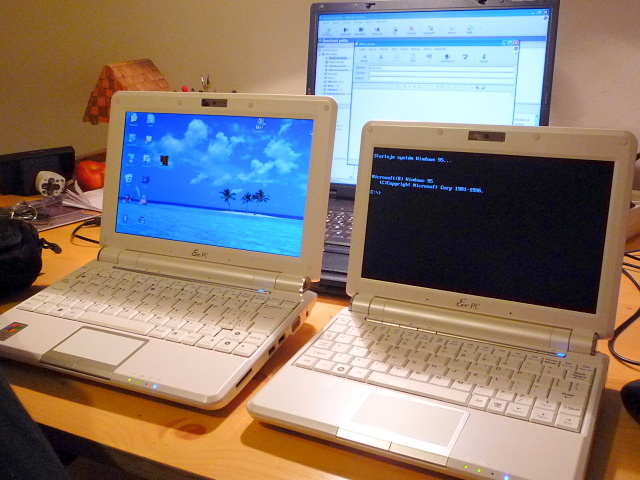
Tak jsem přešel na ideu "laptopu na hřbetě robota". A první, co jsem koupil byl v roce 2010 Asus EEE Pc 1000D - což je netbook, který má jako procesor nějaký podtaktovaný mobilní celeron na 900 MHz - sympatický počítač - žena jej dodnes používá na surfování po internetu.
Pak jsem se vyloženě zamiloval do EEE PC velikosti 9 palců - což svého času byl nejmenší netbook - a taky jsem od Kamila koupil Ausus EEPC 901 - dokonce s dotykovou deskou vhodnou k vestavění do displeje abych měl dotykový displej.
Nebudete tomu věřit, ale při stěhování s novou ženou do nového bytu jsem rozbil jedinou věc - zmíněný dotykový displej - takže malý Asus zůstal bez něj - a je nyní používán k surfování po internetu z postele a k experimentům s různými linuxy.
Vtíp je v tom, že laptop v robotu stále nedává moc smysl - a tak jsem uvažoval jak by "centrální počítač" měl vypadat :
- Patrně by měl být pod nějakým lightweight linuxem
- Patrně by měl mít dotykový displej k hrubému nastavování robota na soutěži "klikáním na veliká tlačítka"
- Patrně by měl mít základ pro komunikaci s AVR - tedy UART
- Měl by být "vidláku-vzdorný" a "vidláku-zvládnutelný"

Kdysi už tady takový "Systém" byl a to Friendly ARM - a dokonce i friendly ARM jsem měl možnost koupit pod rukou, ale nekoupil jsem - protože mi "vidláku- zvládnutelnost" Friendly Armu zdály nedostatečná - zejména kvůli malé "komunitě" užvatelů. Navíc tento systém v počátcích měl pouze 400 MHz ARM a WINDOWS CE !!!
A nakonec "budiž Raspberry Pi" - ne že by tento "systém" se mi zdál v něčem lepší než kterýkoliv jiný, ale komunina "vidláků" kolem něj, z nichž někteří jsou na tom s počítači ještě hůře než já - je impresivní. Jenomže pořád to mělo nějakou chybku - a v tomto případě - ideu jak si autoři představují použití tohoto stroje - děcko šlohne otci monitor s HDMI vstupem, a máti zase USB klávesnici a bude se tvářit, že má "plnohodnotný počítač s linuxem" ? To není příliš kompatibilní s ideou "robotického mozku".
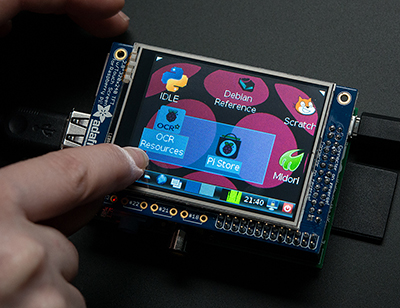
Naštěstí je tu Adafruit a jejich projekt /produkt - v nadpisu zmiňované - PiTFT. Což je "shield" který se nasadí na Raspberry Pi a odtud si vezme hardwarové SPI kterým datově živí malinkatý dotykový TFT displej 320x240 pixelů. Prostě "friendly ARM" jen postavený z jiných komponent - vidlákum na míru.
Přestože jsem téměř 100% přesvědčen, že toto bude budoucí mozek mých robotů - přece jenom bude nutná nějaká drobná práce - minimálně si budu muset postavit "mezi-shield" mezi displejem a Raspberry, kde bude "power management" a nějaké oddělení/přizpůsobení UARTU. Asi budete namítat leccos, ale berte to tak, že jsem "spíše na ty drátečky" a vrcholem mého počítačového řízení robotů doposud byla "hlavíčka pentia 6" o které jsem tady taky psal.
Pro dnešek už zbývá jenom tradiční rada pro blondýny - budete se divit, ale s WIFI kartou stačí Raspberry Pi i na porno na internetu a dokonce jej zvládá až do rozlišení 1920x1080 pixelů...
Poslední věta Vašeho článku mne zděsila. Možná že by se ono výšeuvedené sledování porna 1920x1080 na Raspberry s wifi kartou dalo nazvat jako "porno2Dtagy"...