Elektro
18. července 2013 v 5:35 | Petr
Když stavíte roboty - zejména jako já ze základních součástek - nikoliv z polotovarů - nahromadí se vám doma moře součástek. Vtip je v tom, že většina z nich se dá použít i na něco jiného než byly původně koupeny a když se tak doma válejí v krabici ?
Protože jsem v roce 1993 začínal svoji druhou bastlířskou éru stavbou EKG - snímání biosignálů je prostě moje slabost. Takže jsem jeden pátek seděl za stolem a říkal jsem si - což takhle postavit
pulsní oxymetr.
To je taková ta blbinka co vám nacvaknou na prst ve špitále a hned vidí - jednak jaký máte puls a jednak taky kolik kyslíku je rozpuštěno ve vaší tepenné krvi. Tak jsem prohraboval své krabice a zjistil jsem, že plnohodnotný pulsní oxymetr nepostavím jenom tak za víkend, protože bych potřeboval k němu napsat software pro mikrokontrolér. Na druhou stranu mám plnou krabici robotiky používaných reflexních optočlenů
QRD1114. Osobně sice raději používám CNY70 - protože jsou mechanicky robustnější, ale mají kolem fotodiody a fototranzistoru "rantlík" - takže se na ně nedá prst přitisknout úplně na těsno.

Takže jsem bádal jednu sobotní noc a výsledek se dostavil. Vlevo v kroužku vidíte QRD1114, na který se bějem měření zlehka přiloží prst. Vpravo vidíte - náš svatební dar alias druhý osciloskop !!! - s výsledky - modré šipky ukazují kdy se srdce stáhne vypudí krev a tlaková vlna tohoto pulsu dojde až do prstu. Červené šipky ukazují okamžik kdy se zavře chlopeň mezi srdcem a Aortou (hlavní tepna v těle) - přitom tlak prudce poklesne a tato změna se taky šíří až do prstu.
Moje mladá manželka - zdravotní sestra - na mně koukala jako na boha (a pak ta dohra)..... Prostě Geekův ráj to na pohled. Takže doufám, že jsem vás navnadil dosti - zbývá už jenom vysvětlit princip a dát sem schémátko.
Tedy - už jsem zmínil, že krev v tepnách neteče plynule ( viz hmatání pulsu na ruce ) ale teče ve vlnách synchronních s činností srdce a tyto vlny jsou měřitelné až do mikrokapilár všude v těle a tedy i v kůži. Krev je červená, takže když se krev nahrne do prstu (ucha, čela, žaludku, mozku, jater .....) tyto nepatrně změní barvu - takže není nic snazšího než ozařovat prst IR světlem a snímat množství odraženého (nebo prošlého) světla.

A taky že ano - zde vidíte schémátko toho co je na kontaktním poli. Optočlen QRD1114 vysílá do prstu IR světlo a snímá iodraz fototranzistorem - pak následuje střídavě vázaný transimpedanční zesilovač - ty mám nacvičené z trávoměru, a pak následuje ještě druhý 100x zesilující stupeň. Filtrační a vazební kondenzátory tvoří filtry, které omezují pásmo zesilovače asi tak na 0,5 - 2Hz - což jak vidíte úplně stačí. kdyby to pásmo nebylo tak silně ořezané - začaly by být veliké problémy s rušením 50Hz frekvencí elektrické sítě. ten divný obvod s LED diodou D1 a odpory a kondenzátory kolem ní - je k tomu aby obvod vydával v rytmu tepu intenzivní záblesky - pro připojení osciloskopu je tady paraleleně zapojen ochranný odpor R8.
Proč je tohle jenom čidlo tepu a není to úplný oxymetr ? Protože pro snímání množství kyslíku v krvi potřebujete prst ozařovat dvěma vlnovými délkami IR a červenou - které svítí na stejný detektor a střídají se s frekvencí kolem 1-10kHz - aby mikrokontrolér měl přehled o poměru mezi oxygenovaným a deoxygenovaným hemoglobinem - viz obrázek se spetkrálními křivkami. Pokud byste LEDkami blikotali na 10 kHz - samozřejmě i analogová filtrace by byla tomu přizpůsobena.
Třeba mi jednou hrabne a postavím úplný oxymetr - jako jsem kdysi postavil
úplné EKG. Do té doby musíte čekat, ale blondýny si mohou přečíst ještě radu : Víte co to je - "
žena charakter" - třeba taková, co za pulsní čidlo udělá noc plnou vášně ? Přestože ho miláček nemá v úmyslu vyrábět v miliónových sériích a za utržené prachy vám koupit jachtu ?
28. března 2013 v 5:48 | Petr
Minule jsme probírali, že když můstek vypneme, abychom mohli změřit napětí, které setrvačností rotující motor generuje, tak se svorka motoru, která byla na napětí země dostane s napětím asi na -0,5V - dokud se nepootevře ochranná dioda chránící spodní tranzistor.
Když jsem toto zjistil - trochu mi to zkřížilo plány, kvůli měření malých napětí na zastavujícím se motoru. Takže velice brzy vznikla otázka - jak to vypadá když motor úplně stojí.
A z hlediska napětí to vypadá přesně jak by člověk očekával - po odeznění přechodového jevu se napětí na obou svorkách ustálí na 0V - viz záznam osciloskopu - což odpovídá tomu, že po odeznění přechodového děje se motor netočí, žádné napětí negeneruje a tudíž není ani energie, která by otevřela spodní ochrannou diodu, proto i žlutá stopa sedí na 0V jako přibitá. .
Ne tak úplně jasný je záznam z hlediska trvání přechodového jevu. Proč je nyní žlutý "spajk" 3x delší než na záznamu rychle se točícího motoru ? Okamžítě jsem si začal s "pokusným" robotem, na kterém tenhle můstek "ladím" hrát a brzdit mu kolečka - rukou - do různých otáček.
Šířka žlutého spajku se poslušně měnila přímo úměrně otáčkám - tak jsem si říkal - jsme blbci - rotace magnetů v motoru odsává magnetickou energii cívek - takže čím se motor točí rychleji - tím je pro přechodový děj na jeho cívkách méně energie - tím je přechodový jev kratší.
Z toho by vyplývalo, že stačí nejubožejší komparátor, nebo dokonce přímo připojit kterýkoliv pin MCU přes ochranný odpor na svorku motoru a počítámím času měřít otáčky dokonce i bez AD převodníku.
To vypadalo tak fantasticky, že jsem ani usnout nemohl a právě nočním čumění do stropu se mi to nějak "rozleželo" Ráno jsem vstal a změřil jsem si proud motorem.
Zde je záznam - je v jiném měřítku, ale žlutá stopa je pořád napětí "uzemněné" strany H-Můstku a červená stopa je proud motorem. A bylo vymalováno ....
Co tedy na záznamu vidíme - zcela vlevo vidíme jak po zapnutí proud motorem postupně roste až na ustálenou úroveň. Pak vidíme přechodový jev při vypnutí. Spajk kladného napětí trvá přesně dokud nepřestane protékat - záporný proud - záporný zde v tom smyslu, že z hlediska robota teče proud přes otevřené ochranné diody z motoru zpátky do baterky.
Tedy - čím více jsem motor držel rukou - tím větší proud jím protékal, tím bylo magnetické pole cívek silnější - tím déle pak zanikalo. Takže šířka spajku nezávisí na otáčkách, ale na proudu tedy na něčem jako je "točivý moment" motoru. I tak je to poučné, protože otáčky bez AD převodníku měřit nejdou, ale hrubý odhad proudu motorem je
I = U / (L * t)
kde I je proud, U je napětí baterky, L je indukčnost vinutí motoru a t je čas zániku přechodového děje.
Dosadíte co znáte, co neznáte spočítáte tedy pro můj motor - hrubým odhadem -
L = 300 us * 12V / 2A = 1,8 mH
Indukčnost mého motoru je 1,8 mili Henry - Je to realistická hodnota? nebo ne ? Zdá se mi to docela hodně.
Podotýkám, že místo "kinetiky prvního řádu", která předpokládá, že napětí i proudy se mění exponenciálně a vyžaduje řešit diferenciální rovnice jsem použil "kinetiku nultého řádu", která předpokládá, že vše se mění lineárně a stačí trojčlenka jako na základce.
Přestože pro kondenzátory tahle metoda docela uspokojivě funguje - není vyloučeno že na cívky už nestačí a 1,8 mH je blbost.
Omlouvám, se že tyto věci tak rozpitvávám, ale motory jsou fascinující a pro roboty důležité, proto není špatné jim rozumět více než "je to ta věc co se točí, jiskří a spálila nám loni celou elektroniku" - což mimochodem mně nespálila, ale mnohým ano a to ne jenom jednou ;-)).
Zatím jsem u konce bádání a zbývá už jenom tradiční rada pro blondýny : pokud uklidíte a navaříte v jehlových lodičkách - váš miláček bude nadšen nejméně čtyřikrát - jak máte doma čisto - jak byl oběd výborný - jak bylo dráždivé na vás koukat z pohovky - ale zejména, že jste se s vysavačem ani pánví nepřizabila.
21. března 2013 v 4:58 | Petr
Už minule jsem zveřejnil záznamy z osciloskopu, jak probíhá napětí na svorkách H-Můstku, který se na okamžik vypne aby se mohlo změřit napětí na motoru, který se v tom kratičkém okamžiku točí setrvačností a generuje napětí jako dynamo.
Zde Je první záznam - ˇčervená stopa je jedna strana můstku, ta která je připojena k baterce, žlutá stopa je druhá strana můstku, která je, pro daný směr otáčení připojená na zem.
Kde došlo k vypnutí můstku je myslím jasné. Motor v tom případě funguje jako cívka, ve které se zanikající magnetické pole snaží ještě chvíli udržet proud - což vede k tomu že na tuto chvíli se nám napětí na svorkách motoru obrátí z +12 na -12 voltů. Když se podíváte na žlutou stopu - je to myslím jasné. Stejně tak, když se podíváte na červenou stopu je jasné, že "hrot" červeného spajku mířícího dolů ukazuje, kde je na osciloskopu 0V. (žlutá stopa má 2x větší citlivost a jinou nulovou linii).
Pak vidíte na červené stopě ještě nějaké zákmity a pak vidíte, že se napětí ustálilo "někde mezi" 0V (označuje hrot červeného spajku) a 12V (označeno původní linií než jsme můstek vypnuli). To je ono vysněné BackEMF napětí přímo úměrné otáčkám, které měřím a dále používám.
Aby to nebylo všecno tak idealistické tak se podívejte na žlutou stopu - po odeznění žlutého "spajku" jde napětí na "nulové svorce" motoru dokonce 0,5V "pod zem"
Proč tomu tak je ? - minule jsem psal, že motor je za 4 vypnutými tranzistory a 4 zavřenými diodami - galvanicky "téměř" oddělen od elektroniky robota. Taky jsem psal, že svorky motoru si v takové situaci napěťově "plavou kde samy chtějí" a proto se musí měřit rozdíl mezi nimi. Zároveň jsem taky psal, že pokud by si svorky "plavaly" nad napětím baterie, nebo pod 0V tak se příslušná ochranná dioda v můstku otevře a motor si připojí k danému napětí.
Tedy patrně se talo právě to - patrně motoru nejvíce vyhovuje, když při generování BackEMF napěrí se jednou svorkou "opře" o napětí země a nepatrným proudem drží spodní diodu mírně pootevřenou.
Je to problém ? Je a není - napětí pod 0V AD převodník vidí jako 0V a hotovo - takže hnidopiši mezi vámi už jistě křičí - co když robot jede pomalu a negeneruje napětí vyšší než 0,5V ? Pak se dostáváme do oblasti kde měření BakcEMF nebude příliš lineární - s klesajícím napětí na motoru klesá i ten maličký proud, který drží spodní diodu otevřenou, takže napětí na "žluté" svorce motoru se bude postupně přibližovat 0V. AD převodník ovšem na žluté svorce uvidí pořád jen 0. Na druhé straně pokud je na žluté svorce více než -0,5 V tak i napětí na červené svorce bude vyšší a přece jenom "nějaké napěti" se naměří.
Co s tím dělat ?
- dá se to ignorovat - ať si s rím PID regulace poradí
- dá se k naměřenému rozdílu naslepo připočítávat 0,5 V
- dá se otevřít spodní tranzistor a úbytek na diodě který je 500 mV nahradit úbytkem na MOSFETU, který pro tak malý proud bude skoro nulový.
Osobně jsem zvolil čtvrté řešení - vyhýbat se oblasti kdy BackEMF je menší než 1V jako čert kříži. Důvod je v tom, že moje můstky neumí "sólo" zapnout spodní tranzistor a naslepo připočítávat 0,5 v se mi jeví jako větší zdroj chyb než jet "nad jeden Volt".
Hnidopiši zase křičí - říkal, že BakcEMF můstek nemá problémy s malými rychlostmi a teď toto. Odpovídám ANO - v malých rychostech není odezva na rychlost lineární, ale alespoň je spojitá - na rozdíl od enkodérů naměřim pokaždé nenulovou rychlost - takže tendence PID algoritmu k cukání je mnohem menší.
Opět mám pocit, že už je výklad trochu únavný, takže už končím a dodávám jenom tradiční radu pro blondýny: Jestli chcete do světa vykřičet, že jste lenivá špindíra a chystáte se to udělat tradiční formou, kterou používá spodina - to jest křiklavě barevnými a divoce zakřivenými umělými nehty - zvažte že 5 cm zahnuté "pazoury" značně komplikují klikání na displej iPhonu a hrotem nehtu na kapacitní displej klikat nejde (viděno na vlastní oči - na zapáchající blondýně v černé teplákovce v pražském metru).
17. března 2013 v 6:00 | Petr
Obávám se, že seriál o můstcích už začíná být tak dlouhý, že moji čtenářové začínají pochybovat, jestli můstek vůbec funguje.
Takže rekapitulace jedním souvětím : 6 let jsem konstuoval H-můstek pro ovládání motorů procesorem, až jsem dočel k variantě, která reguluje otáčky motoru pomocí napětí, které motor sám generuje, když se točí setrvačností.
Neboli Pouštíme do motoru proud ve směru červené šipky, protože motor funguje jako systém cívek, tak po vypnutí napájení motorem ještě chvíli teče proud ve směru modré šipky (proto tam musí být ochranné diody) a pak proud motorem ustane a napětí na motoru se ustálí na hodnotě přímo úměrné otáčkám motoru.
Je nutné podtrhnout slovo "proud ustane" - teprve když motorem protéká jen nepatrný proud potřebný k měření - je napětí úměrné otáčkám. Tudíž naše regulace funuje asi takto
- Pouštím do motoru proud.
- Na okamžik všechny 4 tranzistory zavřu
- Počkám až odezní přechodový jev způsobený záníkem magnetického pole v cívkách motoru
- Měřím napětí
- Přepočtu napětí na rychlost a pak porovnám s požadovanou rychlostí a podle toho PID algoritmem spočtu nové parametry regulace.
- GOTO 1 - opakujte minimálně 100x za sekundu ...
Píšu "měříme proud na motoru".... A taky píšku "v době kdy motorem neprotéká proud" a taky Vypneme všechny tranzistory - je tedy otázka když je motor připojen ke 4 zavřeným tranzistorům a 4 zavřeným diodám a proud jím neprotéká tak je vlastně "svým způsobem" v daném okamžiku galvanicky nepřipojen k systému můstku takže je otázka kam vlastně připojít AD převodník procesoru ? Vzhledem k výše uvedenému a taky vzhledem k tomu, že očekáváme jízdu oběma směry je nutné na 1 motor obětovat 2 kanály AD převodníku a měřit v bodě A i v Bodě B a ze změřených napětí spočítat rozdíl.
Alternativou by bylo zapojit do bodu A i do bodu B tzv "
přístrojový zesilovač" což je zapojení operačních zesilovačů, které rozdíl na vstupech zesíli a "
naváže jej" jako offset na referenční napětí. Tato verze je možná, ale zbytečná, protože dnešní mikrokontroléry mají kanálů AD převodníku dosti, zejména když MCU zcela "
obětujete" řízení motorů.
Elektronicky myslící z vás už ale určitě mají v hlavě otázku - motor je za vypnutými tranzistory - galvanicky oddělen od můstku - napětově si "plave kde chce". Co když si "plave" mimo rozsah napětí baterie ? Tato verze naštěstí není možná protože kdyby napětí na svorkách motoru šlo přes napětí baterie, nebo "pod zem" (pod napětí země), otevřely by se příslušné ochranné diody, stejně jako při indukční šipčce při vypnutí motoru.
Jelikož mám opět neblahý pocit, že jsme probrali už mnoho tak jenom jako "potravu pro mozek" zveřejním záznamy z osciloskopu.
Jedeme rychle
Jedeme pomalu.
Žlutá stopa je vždy svorka motoru, která byla připojená k zemi a červená byla připojená k baterce. Zobrazen je jenom časový úsek kolem vypnutí můstku - rovnou lajnu na 12 voltech jsem nechtěl veřejnosti ukazovat ;-)) Výrazný "spajk" na žluté stopě je přepólování napětí na motoru když v něm zaniká proud.
Za domácí úkol dávám vysvětlit proč je tento "spajk" u pomalu se točícího motoru o tolik delší - jenom napovím - aby se motor točil pomalu držel jsem jej "násilím" zastavený.
Zbývá už jenom tradiční rada pro blondýny, co dočetly až sem : Co je pro vás lepší ? Když váš miláček řekne - "chci nový soustruh", nebo když řekne "chci novou ženskou". Ne, že bych byl pesimista - prostě jenom přemýšlejte ....
10. března 2013 v 5:30 | Petr
Jako obvykle jsem si uvědomil, že v seriálu o můstcích se začínám blížit tomu že nejjednodušší motor je trojice cívek (a dvojice magnetů) a tudíž je třeba probrat otázku cívek.
Od pravěku elektrotechniky tak do začátku 50 let se cívce říkalo "samoindukce" protože pouštíme do zkrouceného drátu proud, tím vzniká magnetícké pole, a vzniká nám jiný proud, který stejnými dráty odebíráme - na rozdíl od transformátoru, kde jednou cívkou magnetické pole vytváříme a druhou jeho energii (jako proud) odebíráme.
Středoškolská fyzika zkouší ubožáky z
Faradayova zákona jakože "
průchodem proudu vodičem vzniká magnetické pole jehož indukce působí proti změně proudu, která jej vyvolala". Takže cívka je jako starý důchodce - brání se myšlenku (proud) přijmout a pak se brání myšlenku (proud) opustit. Neboli když na cívku dáme napětí z počátku je proud 0 a napětí maximální, a teprve za nějakou dobu začne napětí na cívce klesat a proud cívkou růst. Tedy jako v mnemotechnické pomůcce v nadpisu.
Ideální cívka, která nemá žádný odpor skončí tak, že vede maximální proud (daný vnějšími součástkami) a je na ní nulové napětí.
Motor je taky cívka, dokonce pokud se netočí tak se chová 100% jako cívka se vším všudy, tak jsem si dovolil nakreslit následující schémátko
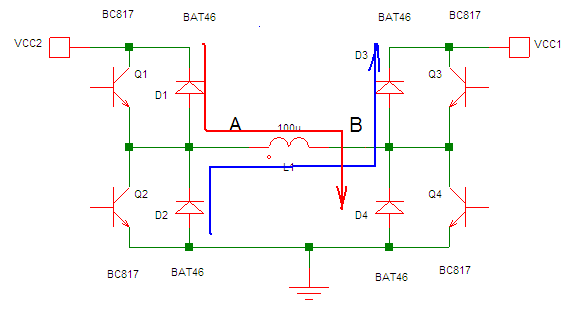
Pokud zapneme tranzistor 1 a 4 tak se proud nakonec ustálí ve směru čevené šipky. Jaké napětí bude v bodě A a B je snadné určit. Na A bude (téměř) VCC2 zatímco na B bude (téměř) nula.
Pak všechny tranzistory zavřeme a cívka pořád chce "tlačit" proud v původním směru. Ve směru červené šipky to ale nejde protože tam stojí v cestě zavřené tranzistory a diody. Tak to musí jít ve směru modré šipky. Všimněte si že část jdoucí cívkou jde pořád stejným směrem. Otázka však je jaké napětí je teď v bodě A a B.
Pomůžeme si "selským rozumem". Aby se otevřela dioda D2 potřebujeme v bodě A mírné záporné napětí (pro normální diody tak -0.7 V). Aby se otevřela D3 potřebujeme v bodě B napětí asi tak o 0.7V větší než VCC1.
Takže okamžikem uzavření tranzistorů se napětí na cívce z + 12 voltů prudce změní na přibližně -13.5 voltů a to trvá tak dlouho dokud cívka má nějakou energii "uloženou" ve svém magnetickém poli - tedy dokud jí prochází (postupně klesající ) proud .
Namětí na civce se dá spočítat podle vzorečku
U = L* (delta I / delta T)
Což není tak důležité, krom toho že moderní polovodičové součástky (tranzistory) vypnou proud téměř okamžíte takže delta T je skoro 0 tudíž
delta I/ delta T je (skoro ) nekonečno. Aby mě robotici nekamenovali tak jsem rychlým rozpínáním cívky vyráběl z 5 V - 100 V. Takové napětí na cívce žádný (běžně používaný) tranzistor nevydrží, proto je třeba mít v můstcích ochranné diody, nejlépe
hodně rychlé a s velkým závěrným napětím, které nám chrání zavřené tranzistory.
Zkušení mohou namítat, že existují můstky s tranzistory MOSFET, které mají vestavěné diody, nebo typu "
Locked antiphase" které se bez diod obejdou - ano ale to je věc pro zkušené - my ostatní prostě koupíme pro dvě kolečka 8 diod za 18 korun a máme klid....
Ještě (možná šokující) poznámku na závěr - paralelně s motorem (cívkou ) se většinou dává ještě konenzátor o kapacitě 1-100nF a to tak že jeden se dá do můstku a druhý na vývody motoru. Zkušní už vědí - to je filtrace rušení motoru. Ale budete se divit, že to má i jinou funkci - některé tranzistory jsou tak rychlé, že ani ty nejrychlejší ochranné diody by se nestačily otevřít a můstek by se i s diodami prorazil - tomu kondenzátor brání tím, že cívka (motor) jej nejprve musí "přebít" z +12 na -13 V a tím se získá pár nanosekund, kdy diody stačí zareagovat ...
No a když jsme u toho schémátku na obrázku - takto jsou zapojeny tzv. "univerzální spínané zdroje" - keré jsou schopny napětí zvyšovat, snižovat a pouštět je zleva doprava i zprava doleva jenom podle toho které ze 4 tranzistorů se spínají a které ne, dokonce i ve schémátku jsem to naznačil, protože VCC1 nemusí mít stejné napětí jako VCC2, ale to probereme někdy příště.
Nyní nám už zbývá jenom rada pro blondýny co dočetly až sem: Dnešní rada bude formou otázky - v nadpisu zmíněné napětí ve vztahu je jasné, ale co, proboha, je ten proud ;-))) ?
3. března 2013 v 3:31 | Petr
Opět
je to více než rok co jsem popisoval svoji téměř 6 let trvající cestu za "
ideálním" způsobem jak řídit elektromotory. Takže jenom pro ty, co jsou líní kliknout na odkaz budu rekapitulovat.
- kdysi dávno jsem pojal ideu elektrického obvodu řídícího motory - tedy H-můstku, který bude jako "mýdlo strýčka Františka" ze Saturnina - trafopájkou sestavený z odpadu a výsledek - skvost.
- Při návrhu můstku mě napadlo použít fintu, kterou pro své třífázové motory používají letečtí modeláři - totiž měřit pomocí napětí rotujícího motoru i jeho rychlost, kterou robot musí znát, neboť ji reguluje.
- Jelikož všechny předpoklady není tak snadné splnít - trvalo mi 6 let a asi 5 verzí než jsem se přiblížil ideálu, loni z jara.
- Loni jsem taky naznačil schéma a prohlásil, že je třeba počkat, jak se můstek osvědčí, což se stalo a můstek se osvědčil výborně.
Dnes tedy nebudeme řešit zapojení tranzistorů, ale probereme otázku měření otáček "
pomocí BackEMF". Opět pro líné jenom jednou větou - vypneme můstek na tak dlouhou dobu až proud v jeho cívkách zanikne - v tom případě napětí na motoru odpovídá rychlosti jeho otáček. Takže máme informaci o rychlosti otáčení přímo z motoru a nepotřebujeme (téměř) žádná externí čidla alias "
Enkodéry" alias snímače otáček.
Kromě "ušetření" za enkodéry ve stylu mého vidláckého hesla, že "nejlíp funguje součástka, která tam není" Má měření pomocí BakcEMF ještě jednu velkou výhodu. Můžete si měřit kdykoliv motor na milisekundu vypnete. U enkoérů musíte "čekat až přijde impuls" což znamená, že při malých rychlostech přijde "nula impulsů" a podle čeho pak chcete rychlost regulovat ?
Samozřejmě můžete předpokládat, že nula impulsů znamená, že robot stojí. Při počítání impulsů však existuje velice nepříjemná věc zvaná "
kvantizační chyba" - neboli "
chyba malých čísel" - takže, pokud robot jede rychlosti 0,5 pulsu za periodu regulace - počítač v robotovi to vnímá jako že polovinu času se stojí, protože puls nepřišel, a polovinu času se jede - což když se "
naivní"
PID regulátor snaží nějak vyřešit může dopadnou nepěkným cukáním v malých rychlostech.
Tím se konstruktér (a programátor) robota dostává do neřešitelné situace - aby robot jel hladce je třeba jeho otáčky regulovat co nejčastěji - třeba 100x za sekundu, ale při této frekvenci se "chyba malých čísel" může projevit už při dost vysokých rychlostech. Pokud naopak regulujeme otáčky třeba jenom 10x za sekundu - chyba malých čísel se tak neprojeví, ale jízda není dosti hladká, protože třeba při rychlosti pomalého chodce - 1 metr za sekundu ujede robot od regulace k regulaci 10 cm - což je u malého robota klidně polovina jeho velikosti.
Nic z toho u měření přes BackEMF není, ale máme jiný problém - napětí na motoru musíme přepočítat na rychlost, což závisí na vlastnostech motoru, je pro každý motor jiné a dokonce se to mění i během jízdy. Takže pokud počítáme ujetou vzdálenost pomocí enkodérů - je to maximálně přesné ovlivněné jenom proklouzáváním pneumatik. U BackEMF to zdaleka tak přesné není, protože po chvíli jízdy se nám motor zahřeje a poměr mezi napětí a rychlostí ze smění.
Proto já osobně používám kompromis - pro regulaci rychlosti používám BackEMF a pro měření ujeté vzdálenosti - značně zjednodušený - enkodér, který místo 4000 pulsů na otáčku kola (ano i tak obrovské počty se používají) funguje jako tachometr na bicyklu - pěkně jeden tik na otáčku - a dokonce používá i stejný hardware - jazýčková relé a magnety z "utržených" cyklistických tachometrů. Jistě je vám jasné, že zařídit 1 impuls za otáčku je mnohem jednodušší než jich zařídit 4000, jinak by to cyklisiti nepoužívali žejo !
Pokračoval bych dále, ale obávám se, že jsem dnes na konci sil, proto zbývá už jenom tradiční rada pro blondýny: Jehlové lodičky stejně nakonec vyjdou z módy, ale dobrý multimetr je na celý život - takže do čeho se vyplatí investovat ?
27. ledna 2013 v 6:30 | Petr
Jen pro
zopakování od minula - pokud vezmeme 4, nebo 8, nebo 16, nebo jakýkoliv dostatečně velá počet antén, umístíme je do kruhu a budeme je postupně připojovat k FM radiopřijímači bude se to rádiu jevit jako jedna anténa, která značnou rychlostí rotuje kolem dokola. Tak značnou, že frekvence prijímaného signálu bude dopplerovým posuvem posouvána nahoru a zase dolů. podle toho se dá určit kdy se "virtuální anténa" k vysílači přibližuje a kdy se vzdaluje, a podle toho se dá změřit azimut k vysilači. Detaily viz minule (nutno přečíst).
Minule jsem naznačoval, že přenosové pásmo FM rozhlasu je poněkud chaotické.
U AM -
amplitudového vysílání - je to jasné, ve spektru máme nostnou vlnu a na obě strany od ní postranní pásma, pokud nám z rádia naladěného na 1 MHz vřeští Kája Gott na frekvencí 4 KHz vypadá spektrum takto - máme tři "
spektrální čáry" - 996 KHz - dolní postranní pásmo, 1000 kHz nosná, 1004 kHz horní postranní pásmo.
U FM -
frekvenční modulace - závisí spektrum signálu na poměru mezi právě přenášenou frekvencí a tzv
modulačním zdvihem což je tzv
Modulační index, který má zásadní vliv na tvar spektra - určité modulační idnexy mají spektrum s výraznou nosnou jako AM a určité zase nemají nosnou vůbec, spektrum Káji vřeštícího na 4 KHz však v principu vypadá tak, že od 0 Hz do nekonečna každé 4 KHz je "
spektrální čára" a jenom umělou filtrací na výstupu z vysílače se šířka pásma omezí na kompromisních 100kHz.
Takže pokud radiokompas přijímá čistou nosnou na 100 MHz bez modulace a přepíná antény s frekvencí 4 KHz je na výstupu FM signál s u kterého modulační zdvih odpovídá vzdálenosti antén, a modulovaná frekvence je právě těch 4 kHz.
Teď si představte, že vstupem není čistá nosná, ale FM modulovaný rozhlasový signál, který má FM mono kanál, pak rozílovou složku mezi levým a pravým kanálem namodulovanou na nosnou 38 KHz. ,která je ale potlačená, místo toho je v signálu pomocná nosná 19 kHz, a ještě jsou tam pomocné informace jako RDS nebo dokonce signály pagerů - prostě opravdu "bordel" , ve kterém váš signál s frekvencí 4 kHz a nepatrným modulačním zdvihem zcela zanikne.
Jak z toho ven - především proč pořád mluvím o frekvenci přepínání 4 KHz - to je proto aby naše modulace prošla audio filtry rádia od Vietnamce. První úkol tedy bude vykašlat se na rádio od Vietnamce (nebo si z nej vyvést signál ještě před závěrečnou filtrací) abychom mohli frekvenci přepínání antét umístit někam, kde v FM spektru "nic není". Idelní by byla oblast mezi 19-23 kHz, nebo mezi 53 až 55 Khz.
Teoreticky bychom mohli antény přepínat jěště rychleji ale jsme omezeni keramickými filtry ve FM přijímači, které frekvence nad 75 kHz od nosné nepustí. Takže si představme, že máme postavené vlastní FM rádio, a přepínáme 4 antény frekvencí 84 kHz což odpovídá situaci, jakoby jedna anténa rotovala frekvenci 21 kHz, takže v demodulovaném signálu máme frekvenci 21 Khz jejíž fázi musíme zjistit, i přesto že tento signál je ukryt v chaostu FM modulovaného rozhlasového vysílání.
Principem, jak na to, je kombinace mixéru a dolní propusti, které se říká
Lock In amplifier. Na podobném principu pracuje i
Synchronní detektor AM signálu. Vtip je v tom, že když máme 4 antény tak někde za FM demodulátorem budeme mít 4 spínače a 4 kondenzátory - každá anténa bude nabíjet "
svůj" kondezátor - takže signál, který je
sychnronní s přepínací frekvencí 84 / 21 KHz se na kondendenzátorech bude sčítat a ostatní signály se občas přičtou, občas odečtou a tím se vlastně potlačí.
Po pár desítkách milisekund nabíjení konenzátorů napětí na nich změříme procesorem odečteme třetí od prvního a čtvrtý od druhého, číž získáme známou dvojici I a Q signálů, kterou už umíme převést na fázový úhel.
Vtip celého
synchronního neboli lock - in zesilovače je opět v mixování signálu se signálem stejné frekvence, čehož výsledkem je signál malé (nulové) frekvence. Kapacitu kondenzátorů zvolíme co největší, tak abychom ještě stačili měřit dostatečně rychle. Pokud jsem tedy počítal s měřením azimutů všech rádí v Brně - řekněme tedy 50 rádií 10x za sekundu - musíme udělat 500 měření a pokud započteme i
Nyquistovo kritérium potřebujeme šířku pásma 2x500 =
1 KHz.
Díky lock-in zesilovači máme pracovní frekvenci 21 KHz, ale rušení - odpovídá 1 KHz - pokud je i tak šum vysoký - musíme měřit ještě pomaleji a dát tomu odpovídající větší filtraci. U vědeckých měřeních není vzácností měření Lock-In zesilovačem trvající minuty, nebo hodiny, které odpovídá šířce pásma třeba 0,0001 HZ, nebo méně. Tím se dá "těžit" signál zpod šumu i tam kde po signálu zdánlivě není ani památka.
Lock-in zesilovače jsou, z jistých důvodů, pro roboty přímo ideální, takže nepřepínejte brzy budeme pokračovat.
Zbývá už jenom oblíbená rada pro blondýny, co dočetly až sem - nebudete tomu věřit, ale stálý partner, který ví, které čudlíky mačkat, je v posteli daleko lepší, než žhavá epizodka na jednu noc - zeptejte se brunet, ty vám to potvrdí ....
17. ledna 2013 v 5:06 | Petr
Kdysi jsem intenzivně vysílal na CB pásmu. Na tom vysílali před érou mobilů skoro všichni, takže jako obvykle v našem regionu se vyskytli trotli, kteří s třemi promilemi v krvi ukazovali ostaním "jak na to mají", takže kanál trvale obsazený blábolemím a zvukem blití nebyl vzácností. V jisté době už bylo nutno na CB frekvencích poněkud "uklidit", čehož jsem se ujal tak, že celou zimu až do července 2000 jsem jako Gestapo chodil po Frýdku se zaměřovací anténou a zjištoval, odkud tito "gumáci" vysílají. Pak nastala druhá fáze, kdy řetězcem známostí jsme třeba našli šéfa dané osoby, a domluva od něho většinou způsobila, že místo blití se rozhostilo ticho ....
Při tom jsem si užil mnoho srandy - například na jaře, jak slezl sníh začal se mnou po sídlišti chodit týpek vzhledu - šíleně prochlastaného Jarka Nohavicy - a pořád na mně pokřikoval - nevím co to děláš, ale rozbiju ti hubu ;-))
Takže techologii zaměřování "nepřátelského vysílače" mám dodneška docela v ruce, včetně zaměřovacích antén, které jsem vyráběl a potřebným zadarmo rozdával, kterých mám pořád plný sklep.
Na to jsem si vzpoměl v roce 2009 kdy jsem pomáhal při
Robotour v Brně-Lužánkách, kde kolem parku vede tramvajová linka a přímo v parku je měnírna pro tramvajové troleje - tudíž pod povrchem parku vedou dráty pro napájení tramvají, které mají v Brně tyto parametry - stejnosměrné napětí kolem 600V a proud - když se tramvaj rozjíždí až 600A. Takže kluci - soutěžící - si neustále stěžovali na místa a okamžiky kdy nepredikovatelně selhal kompas robot podle robustnosti algoritmu - buď se musel orientovat podle GPS, které pod stromy taky není nejpřesnější, nebo tradá z cestičky i z kola ven. Jak jsem to tak pozoroval tak ta místa selhání byla více-méně na čáře od měnírny k ulici s tramvajovou dráhou takže - proč asi kompasy selhávaly ??
To mě vedlo k sérii nápadů jak kompas nahradit. O slunečním kompasu už jsem se zmiňoval a jelikož jej mám rozestavěný tak se ještě zmiňovat budu, ale nápad číslo 2 je Radiokompas. Radiokompas je po harwarové stránce totéž co zaměřovací přijímač - rozdíl je v tom, že při zaměřování je poloha a azimut zaměřujícího známé a hledáme skrytý vysílač u radiokompasu známe polohu vysílače a měříme neznámý azimut vzhledem k neznámé poloze přijímače - tedy rozdíl jen filosofický nikoliv elektronický.
NA střeše auta vídíte právě takový zaměřovač, který má tu výhodu, že nemá žádné pohyblivé díly. Pokud se budete pohybovat po Slovensku, nebo po Maďarsku tak řada policejních aut má taky "čtyři antény do čtverce" což znamená, že jejich policie tolik nešetří a jsou taky vybavení prostředky pro zaměřování.

Jak tedy celý systém funguje ? Představte si že elektronika ty 4 (nebo 8 nebo 16) antén postupně připojuje k přijímači a to tak, že k přijímači je připojena vždy právě jedna anténa. Postupným přepínámím antén do kruhu vzniká situace, která je ekvivalentní tomu, jakoby jedna anténa rotovala pěkně dokolečka. V tom okamžiku začne hrát roli ten "doppler" - pokud se "virtuální" rotující anténa přibližuje ke zdroji signálu - tedy se přepne ze vzdálenější na bližší anténu frekvence zachycená přijímačem je vyšší, pokud se virtuální anténa "vzdaluje" tedy se přepne z bližší na vzdálenější anténu je přijímaná frekvence nižší. Nosná vlna "nepřátelského vysílače" tedy získá parazitní frekvenční modulaci. Při elektronickém přepínání 4 antén není problém dosáhnout značné "virtuální otáčky" třeba 4000 otáček za sekundu - přijímaný signál tedy získá frekvenční modulací 4 KHz. Vtip je v tom, že FÁZE této frekvence - tedy přesněji fázový posun mezi signálem, který přepíná antény a přijatou modulací - je přímo úměrná azimutu k vysílači.

Moje idea tedy byla následující : na hřbetě robota budou 4 antény, přijímač a mikrokontrolér. Mikrokontrolér bude scannovat celé pásmo VKV rádií a u každé radiostanice si poznamená azimut. Když se pak robot dá do pohybu bude dělat to samé, a do nadřízeného procesoru bude hlásit průměrnou odchylku mezi azimuty změřenými v klidu a za jízdy. Díky tomu, že bude měřit azimuty více (mnoha) vysílačů - nebude zmaten výpadkem příjmu, nebo odrazy na trase jediného z mnoha VKV rádií.
Proč jsem tuto ideu nakonec nerealizoval ? Jednak jsem zatím vůbec nepostavil robota pro Robotour, tedy ani jeho kompas. Druhý důvod je v tom, že ideální rozestup antén je 0,22 * vlnová délka, která je pro VKV kolem 3 metrů - tedy ideální je čtverec 66 x 66 cm. (může však být i menší) - což je pro robota trochu moc. Třetí důvod je komplikovanější a spočívá v tom, že VKV radiostanice používají širokopásmovou FM modulaci takže nic jako "jedna nosná vlna" u nich neexistue, jejich signál připomíná spíše 100 KHz široké pásmo frekvenčně modulovaného "bordelu" - a v dobách kdy jsem o tom uvažoval jsem ještě neuměl "spínaný mixér" použít jako fázový komparátor takto "zabordelařených" signálů, takže jsem šel cestou slunečního kompasu, který však má taky svoje ale.
Dneska by mi vyhodnocení sginálu už nedělalo problémy, takže třeste se pardálové, než mě moje ženská přivede do hrobu, určitě vyzkouším jestli to funguje. Vzhledem k množství VKV rádií v republice pochybuju, že lze postavit robustnější zařízení pro měření azimutu. Pokud máte čas a chuť - hrr do toho a zkuste to dříve než já - budu jenom rád.
Dnes tedy zbývá už jenom rada pro blondýny, co dočetly až sem : jak často se s chlapem díváte na porno ? Tak často, jako jej nutíte sledovat "
deníčky růžových střevíčků", všechy díly "
Princezny Sisi" a kraviny od
Rosamunde Pilcher ? Víte co s ním ty růžové volánky a štěbetání blondýn bez mozku dělá ? Divíte se jeho nerudnosti ?
3. ledna 2013 v 5:40 | Petr
Chirurg, internista a psychiatr jsou na lovu kachen. V křoví se šustne a chirurg okamžitě střílí a říká - "co kdyby tam byla kachna ?". Pak se vznese kachna a internisna říká "vypadá to jako kachna, letí to jako kachna, asi to bude kachna" vystřelí a mine. Pak se vznese další kachna, když zmizí za obzorem, psychiatr usedne na pařez zapálí sí dýmku a mumlá - "jasně, že je to kachna, ale ví ta kachna, že je kachna ?"
Takže když už si osobuju právo autoritativně radit jak stavět elektroniku pro roboty tak dneska moje drzost dosáhla vrcholu a probereme jak u toho myslet.
Vždycky mě fascinovaly články radioamatérů, kteří vysílají na extrémně vysokých mikrovlnných frekvencích 76GHz, 122GHz - abyste udělali světový rekord ve vzdálenosti spojení, musíte to dělat stejně jako stáj Formule 1 - to jest nesmíte opomenout absolutně nic. Pokud rojící se komáři v dálce rozptylují vlny musíte běžet tři kilometry a Raidem je vystříkat....
Takže když si čtete článek od takových lidí - nečekejte, že se tam dozvíte jak funguje LC oscilátor. Tam se dozvíte jaký má gravitace měsíce v úplňku vliv na stabilitu oscilátorů, a jestli lesní víly tlumí mikrovlny více nebo méně než hejkali atd .... No a protože příroda je extrémně komplexní systém postavený na jednotných zákonech - nakonec se nepochybně dozvíte, že všechno "tak nějak" souvisí se vším a taky cokoliv má "tak nějak" vliv na cokoliv jiného .....
Takže pak sedíte nad papírem a přemýšlíte jak koncipovat příštího robota (diplomku, dopis milence, projekt do práce atd ....). V takovém případě je velmi snadné podlehnout fenoménu "
analysis paralysis". Tedy úplnému rozpadu schopnosti cokoliv rozhodnout v hrůze, že to bude "
tak nějak" souviset a mít negativní vliv na jinou část projektu později.
Takže v potu tváře sháníte a studujete literaturu, půl roku bádáte nad zapojením, pak půl roku stavíte první prototyp, zapojíte napájení a nic ani LEDka neblikne. Problém je v tom, že jste ač jste pracovali jako lvi, tak jste zanedbali mnoho stupňů na cestě opravdu rychlého vývoje.
Takže bych si dovolil uvést několik velmi bolestivě získaných zkušeností:
- Jednoduché je složité a složité je jednoduché.
- Dlouhá cesta jde rychle, krátká cesta se vleče.
- Kdo hodně myslí málo ví.
Jesli máte právě pocit, že budeme pokračovat výkladem o zenovém budhismu, nebo přihláškou do nějaké sebevražedné sekty - tak nikoliv. Ale rozebereme podrobněji:
Ad 1, 2 i 3 nemohu se ubránit další historce - dřevorubec seká strom tupou sekerou a je celý zpocený, ostatní se ho ptají : "proč si nenabrousíš sekeru", a on "protože bych nestihl ten strom porazit".
Takže ne, že bych horoval za ostrou tužku, ale začněte shora dolů a vyčleňte si klidně několik dnů na "porcování robota". Rozdělte celého robota na bloky, ty bloky pak na další bloky a ty na další až se dostanete ke komponentům tak malým, že je lze zkusmo postavit za odpoledne, nebo max za víkend.
Podstatnou vlastností těchto bloků je i to, že by měly být jednoduché tak aby pokud možno měly jenom jeden bod, ve kterém mohou selhat. Příklad: Zesilovač alias VF buffer mám dokonale odzkoušený, ale o vlastnostech a stabilitě oscilátoru mám jisté pochybnosti, tak je dám dohromady do jednoho bloku. Pokud ovšem mám i o VF Bufferu pochybnosti tak bych ho měl udělat extra.
Pak vyberte blok, který je relativně samostatný na ostatních nezávislý - zkušenost říká, že to bývá blok, který generuje pracovní kmitočet - ať už oscilátor do rádia, nebo mikrokontrolér do robota. Tento blok postavte a vyzkoušejte a zkoušejte a měňte tak dlouho, dokud nebude fungovat.
Pak další a další a další , přičemž ty další už můžete stavět jako "přílepek" k ostatním, které už vám fungují.
Princip je v tom, že ne "celá elektronika je velké neznámo" ale "neznámo" je jenom "tenká slupka" mezi tím co máme už hotovo a funguje to a zbytkem robota.
Na první pohled tahle cesta vypadá jako ta nejpracnější, protože skončíte s "vrabčím hnízdem přílepků", který pak budete muset udělat "celý znovu" a načisto. Dokonce i já musím bojovat sám se sebou, abych tento postup dodržel, ale rychlost v pomalosti tohoto postupu je v tom, že se při něm prakticky nezahazuje žádná práce a pokud se zahazuje - tak je to ten nejmenší blok, plánovaný na jedno odpoledne.
Tedy ne že plánujete radar na 25 GHz, nebo jinou odvážnou konstrukci, a pak zjistíte, že "za boha" nejste schopni postavit nekmitající zesilovač na tomto pásmu a tak celá idea (se spoustou naroutovaných desek) jde do smetí....
S tím taky souvísí bod 3 - jinak známý citát doktora Fasta z "
Básníků". Můžete v datasheetu 100x číst, že šum operačního zesilovače je 40uV zatímco šum jiného bude 5uV, ale jak se tento šum bude snášet se zbytkem zapojení a jestli si to nevynutí nějaké zásadní změny, které by znamenaly zahodit půl roku pokusničení - nikdy předem nevíte, dokud sami nezkusíte.
Příklad: když jsem stavěl VKV rádio zjistil jsem že oscilátor nelze donutit kmitat nad 60MHz - tak jsem celý oscilátor musel postavit na plošném spoji a zbavit se parazitní kapacity kontaktního pole, jinak se nedalo hnout z místa.
Abych vám to vrabčí hnizdo přílepků trochu zpříjemnil - při dělání definitivní verze - často máte možnost napravit nějakou "
hluboko vestavěnou chybu" -
single ended zesilovač předělat na
diferenciální odolnější proti rušení atd. Jenom si dejte pozor aby změny byly opravdu decentní a nepatrné, jinak byste po překonání analysis paralysis mohli, radikálním "
předěláváním všeho" upadnout do "
second system efektu".
Je to divné, ale "přísahám na holý pupek", že dělat robota dvakrát je rychlejší, než dělat ho jenom jednou a ještě navíc získáte zkušenosti, které jsou lepší než informace z literatury, a ty jsou zase lepší než "jenom si něco myslet" což v tomto případě znamená spíše planě spekulovat.
Zbývá už jenom obvyklá rada pro blondýny, co dočetly až sem - na prvním rande, můžete s chlapem probrat Vaši sbírku odvážného prádla - pro vás - , ale rozhodně raději neprobírejte vaši sbírku sladkého prádla - pro miminko - nikdy nevíte jak by si to vyložil a zdali by třeba neprchnul.
3. července 2012 v 4:29 | Petr
Chcete se stát elektroniženýrem přes potenciometry ? Že to nejde - Pchá - stačí jenom když sepíšete 100 stránkovou diplomku o tom jak PC s programem v
Pythonu přes
USB řídí
ARM, který přes
SPI řídí nějakou
PICku, která přes
I2C řídí
digitální potenciometr, který reguluje hlasitost zesilovače MP3 z vašeho iPodu. Dokonce na toto "
zařízení" můžete získat nějakou dotaci EU za "
výzkum" atd. Já vámi sice budu hluboce pohrdat, ale proč se, v době všeobecného podvádění, neživit náhradou "
čudlíku za 30 kč" zařízením za 30 000 kč ?
Abych nebyl přilliš jednostranný tak historka z opačného spektra - měl jsem vyrobit blikátko pro noční lítání s RC letadlem, které mělo produkovat intenzivkí záblesky a mít minimální spotřebu, tak jsem spočetl odpory pro
NE555, vše jsem postavil 100 us se svítilo a pak se 300 ms nesvítilo - se CMOS verzí NE555 byla spotřeba kolem 100 uA ani vypínač jsem tam nemontoval. Pak jsem to donesl známému, který o to žádal, ten na to chvíli kouká a pak říká - je to skvělé, ale nedalo by se to předělat aby to třikrát rychle bliklo a pak byla delší pauza !!!!!
Vysvětlil jsem že s NE555 by to opravdu nešlo a výdledkem bylo zklamání na obou stranách a poučení - dnes když budu stavět blikátko tak jedině s mikrokontrolérem aby až si "zákazník" vymyslí nějakou blbost - vyblikát jméno milenky morseovkou - to šlo do blikátka naprogramovat.
Tím se dostáváme k otázce kde mikrokontroléry použít a kde ne. Tahle otázka je při povrchním rozboru zbytečná, protože moderní doba velí "použít i tam, kde to nejde" ale selským rozumem přece jenom jsou jisté zásady, které je rozumné dodržovat.
Tedy kde se absolutně neobejdete bez analogové elektroniky
- Ochranné obvody proti přepólování, zkratu selhání softwaru atd. Obecně ochrana proti chybě obsluhy a programátora. Vždy vypadá lépe když se na svém blogu vymlouváte, že jste nepostavili robota, protože C vám nejde a od trafopájky je při současném počasí moc velké vedro, než když zoufale píšete "sedem razy jsem to zapl a sedem razy to shorelo" (pamětníci diskusí na Pandoře tuší kam mířím)
- Filtrace napájení aneb "svatá trojice kondenzátorů"
- Analogová filtrace vyšších než Nyquistových frekvencí před digitalizací. AD převodník a jeho Sample and hold obvod funguje de-facto jako směšovač, takže pokud se vám do AD převodníku dostanou frekvence které jsou vyšší než 2 násobek frekvence AD převodu do výsledných digitálních dat vám takto proniknou produkty směšování vstupního signálu a vzorkovací frekvence - jednoduché jako facka na Matfyzu, ale je za tím složitá teorie. Obecně AD převodník "uvidí" signál, který neexistuje.
- Analogové zesílení a proudové posílení výstupů čidel - existuje sice hard core zapojení sonaru kde PIC je napojen přímo na UZ měnič. Pin PICky přepnutý jako výstup rozkmitá měnič a pak se přepne jako vstup a AD převodníkem "poslouchá" - ale není to nic co by se svojí funkci byť blížilo k optimu - pamatujte, že AD převodníky potřebují impedanci zdroje signálu max 2 Kohm čím rychlejší AD převod tím menší vnitřní odpor zdroje.
- Spínání velkých proudů a vysokých napětí z MCU
- Demodulace signálů na frekvencích nad možnostmi mikrokontroléru.
To jsou věci absolutně nutné, pak jsou věci, které jsou "
k úvaze" můžete signál fitrovat pomocí FFT ve výkonném mikrokontroléru, ale často stačí místo "
Dual" operačního zesilovače použít "
Quad" (čtyři v jednom pouzdře) a udělat filtr analogový a pak použít daleko jednodušší MCU. Můj názor je, se shoduje s
Bobem Peasem z Nationalu, že "
the best programming language is a solder" - neboli "nejlepší programovací jazyk je pájka" a než ladit nějaké složité numerické algoritmy - zapojit pár odporů a kondenzátoů je většinou rychlejší.
Existuje dokonce i možnost jak spínat sekvence činnosttí "analogově" a to pomocí čítačů typu 4017 nebo 74HC164, ale to je už jiná kapitola.
V každém případě historka s blikátkem budiž vám varováním. Dnes je doba kdy lidi kupují "
Gadgety'" do kterých si instaluji "
widgety". Takže je lepší když analogové jádro Vašeho obvodu je nenápadně sryto "za MCU", které dá uživateli iluzi, že obvod je "
highly customizable and programable". Prostě přeprogramovávat žehličku na televizor je sice blbost, ale když to pomůže v konkurenčím boji ???
Dnešní rada pro blondýny zní - není vždy potřeba holit se "na nemluvně" - "kožešinka" prosvítající přes letní šaty bez kalhotek má své kouzlo a tisíciletou tradici....













