Elektro
12. února 2012 v 19:08 | Petr
Nejprve úvod pro provozovatele Blog.CZ - omlouvám se za nadpis - ale jsem zase - jako vždy během víkendu - poněkud vytočený - takže mi - když tak písněte - a já ten nadpis změním.
Nyní k věci - můj otec se považuje za bohatého člověka tak binec na paměťových kartách svých foťáku řeší tak, že neřeší a kupuje si nové karty jako se kdysi kupovaly filmy.
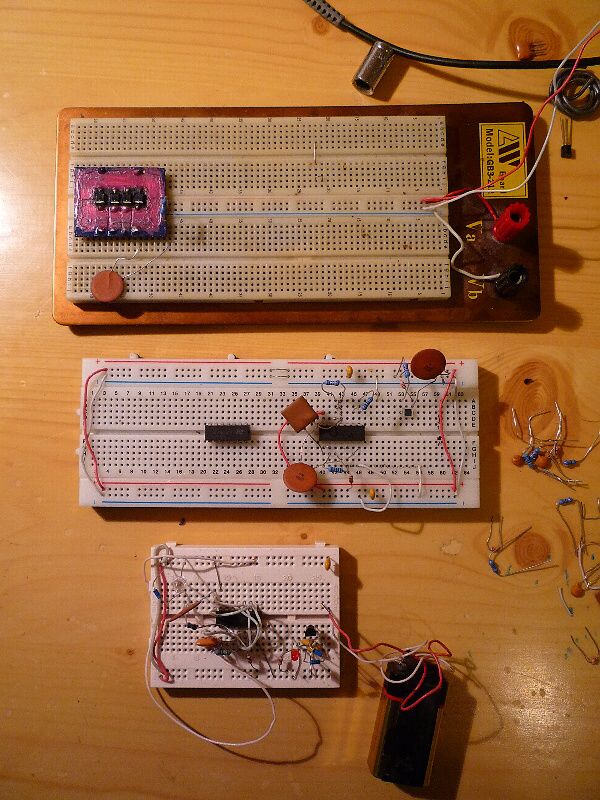
Na obázku vidíte tři kontaktní pole. Horní pochází z roku 1993 kdy,
jak jste četli zde, jsem jsem se vrátil na krátký čas k elektru a koupil jsem si kontaktní pole - nejdražší jaké jsem si tehdy mohl dovolit (TOHLE stálo kolem 800)
Pak došlo ke dvěma procesům - moje výplata (pomalu ) rostla a ceny kontaktních polí (pomalu) klesaly. Takže od určité doby jsem se vědomě rozhodl, že na každý větší projekt budu kupovat nové kontaktní pole - takže s kterýmsi robotem jsem koupil kontaktní pole dole (byl jsem opatrný, takže maličké) - to co na něm je postaveno je blikač který bliká modrou LEDkou přesně na 5.5 MHz což řídí keramický filtr zapojený jako krystal v
Pierceově oscilátoru.
Když jsem měl velké a malé kontaktní pole tak jsem se zase jednou rozhodl koupit třetí. Bohužel mezitím
globalizace a katování kostů začalo nést své hořké plody - takže třetí kontaktní pole - to vprostřed je nejnovější a naprosto nejhorší
Vývody součástek se tam vůbec nedají zasunout rukou - musí se kleštičkami - což součástkám nebrání vyskakovat z kontaktního pole ven. Vrchol ovšem nastal nedávno - viz foto - na kterém vidíte moji milovanou fotodiodu (nemám jen jednu ;-) BPW34 a u ní je CMOS předzesilovač postavený ze 74HC00 - pořád jsem nevěděl proč dostávám tak 100x až 1000x menší signál nez na předchozím zapojení (postaveném na horním kontaktním poli)
Jistě tušíte proč ! Vazební kondenzátory kolem BPW 34 se uvolnily a signál místo kondem o 100nF procházel několika pikoFaradovou parazitní kapacitou kontaktu - týden života v prdeli, kvůli hajzla, který v zvedl svůj mrzký zisk o pár procent....
Už jsem klidný a nabízím 1 kus kontaktního pole do dobrých rukou. (Ne ovšem začátečníkovi - lidí co umí elektro je už tak málo a nemá smysl odradit dalšího)
Obvyklá rada pro blondýny, co dočetly až sem - bádám - běžte se bodnout ...
5. února 2012 v 17:51 | Petr
Když sleduju zprávy o světě kolem, pořád se mi vkrádá slovo "Mizérie". Pokud jsou politici nápadně usměvaví, tak se k tomu přidává slovo "hrůza" ale to je na jiný blog.
Výrobci elektroniky hromadně utekli do Číny, s nimi velkodistrubitoři součástek a malodistributoři se po mnoha kolech "
katování kostů" dostali do situace, kdy jejich nabídka je dnes jen o pár facek lepší než bolševická Tesla v roce 1986 (bereme-li v potaz že bastlíři za bolševika uměli z germaniových trazistorů sovětské výroby vyrobit všechno od zapalování do Tráboše po atomovou bombu). Proto, jako v roce 1986, už pár let, vždy hledám, jaké součástky použiju a zároveň, čím je nahradím, když je neseženu ....
Už jsem jednou psal, že fotodiody je možné nahradit LED diodami, ale udělal jsem v poslední době nějaká měření a objevil jsem že některé infračervené LED se téměř vyrovnají fotodiodám, takže jejich použití nemusí být výraz zoufalství po zhroucení globální civilizace, ale možná by se pár LEDka a stejná LEDka jako fotodioda vedle sebe dal použít jako čidlo.
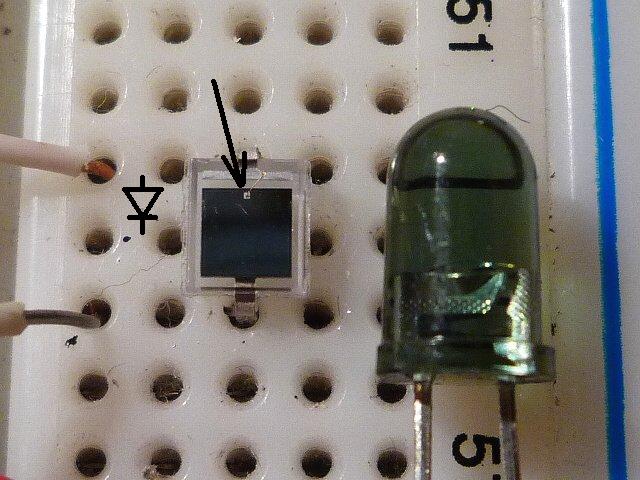
Kdysi jsem stáhnul PDF od Telefunkenu o fotodiodách, a od té doby jsem chytrej jako rádio, takze to co vidíte uprostřed obrázku je asi tak 20x zvětšená moje milovaná BPW34 (poslední fotodioda volně na trhu) - je velice citlivá, relativně nízkošumová a má zvláštní vlastnost, na kterou jsem přišel a nikde jsem o ní nečetl.
Šipkou označené je místo kde je k čipu připájená anoda - a je zajímavé, že fotodioda je kolem tohodle "ďubku" asi 10x citlivější na světlo než na zbytku plochy. Asi to bude souviset s šířkou závěrné vrstvy a taky s tím, že elektrony vyražené světlem kolem anody - se nemusí prodírat milimetry polovodiče a hned mohou skočit do "celovodiče" - kovového drátku který je tam vidět ....
Že by to mohlo způsobovat problémy, kdy pohyb optikou zaostřeného paprsku po fotodiodě může elektronika mylně vnímat jako změnu jeho intenzity - je jasné - nevím jak velký problém by to mohl být, ale stěžujte si když máte na výběr BPW34 nebo nic ...
Vpravo je Infračervená LED - tedy svítivá dioda, která svítí, ale vlastně nesvítí, protože její světlo oko nevidí - konkrétně tato je typ LD274. Představte si že proud vyvolaný světlem touto diodou je při stejném difuzním osvětlení žárovkou celá 1/3 proudu BPW34 - uvědomíme - li si že svítivá dioda má tmavé pouzdo (filtr viditelného světla) a navíc že má optiku, která svítí jen v 10 stupňovém úhlu - je patrně "holý čip" téhle LEDky citlivější než "opravdová fotodioda"
Zajímavé ne - Hlavně zajímavé je to že BPW34 je bez optiky a její sestřičky s optikou jsou špatně dostupné a tady máme citlivou diodu která v propustném směru svítí pod úhlem 10 st. a v závěrném snímá světlo ve stejném kuželu citlivosti.
Úplně si představuju, že jednoho dne do hliníkového bločku (jestli hliník nebo vrtačky nezakáže EU) vyvrtám na stojanové vrtačce dvě (přesně rovnoběžné) dírky 5mm a zastrčim dvě diody jedna bude blikat, druhá bude měřit odraz - dokonce na správně vysoké frekvenci by se tak dala měřit i vzdálenost na principu fázového zpoždění odraženého světla
- Velmi zajímavé měření vzdálenosti - až zase zmizí z trhu ultrazvukové mikrofony, jakože nyní v
GESu jsou (opět) po dvou letech.....
LED diody svítící ve viditelném světle jsou výrazně méně citlivé a moderní modré a bílé diody s luminoforem se nedají použít vůbec - takže jenom doufám, že nějakého "managera" nenapadne v přištím kole katování kostů přestat dodávat infračervené LEDky - když jejich světlo "stejně není vidět" ....
Jak říká kolega v práci když naříkám nad trhem elektronických komponent: "jediné společností podporované koníčky jsou - metrosexualita, poflakování se v kavárně, vypadání COOL a shoppování". A já blbec otravuju s diodami.
A tradiční rada pro blondýny, co dočetly až sem - jsem nasranej - takže přízemí : Hrnec guláše je někdy lepší než striptýz na celou noc ...
2. února 2012 v 2:08 | Petr
Jdeme do finále - jelikož mi letos bude 40 je na čase abych otázku řízení motorů pro roboty konečně vyřešil.
Ale ještě opakovací lekce - po otci mám z 50 let knihu "Elektrotechnika pro dělníky" odkud je krásná zkratka EMSA alias Elektro_Motorická_SílA což zní hrozně ale anglické EMF - je to samé Electro_Motoric_Force. Tedy napěti které indukují rotující elektrické motory, které působí proti napětí baterie a zmenšuje protékající proud motoru točícího se bez zátěže.
V
minulých dílech jsem probral trnitou cestu k můstku, který bude jednoduchý, funkční, a ještě půjde vypnout aby se ta EMSA nebo jak psali v "dělnících" protiEMSA dala změřit.
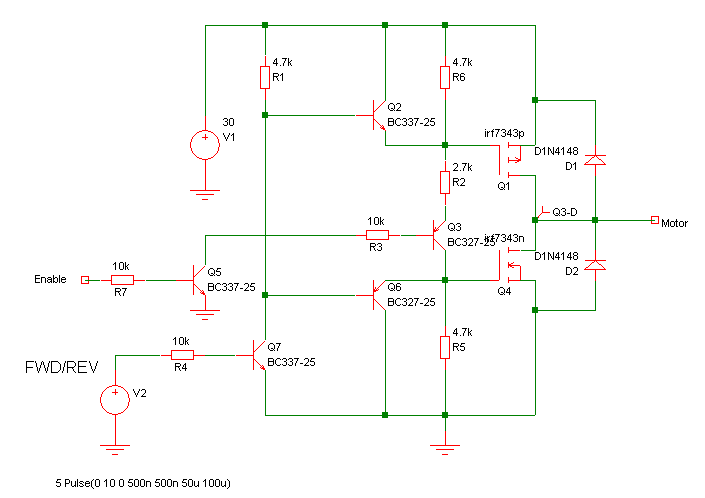
Zatím poslední a konečné řešení vypadá takto :
Všimněte si že odpor 2,7K i dva odpory 4,7 K zůstaly aby regulovaly nabíjení mosfetů a konečné napětí na gate. Q6 a Q2 si prohodily místo (PNP za NPN a naopak ) tím se jejich báze připojily na pro ně bezpečné napětí a nehrozí lavinový průraz. Osobně nemám takto zapojené dvojice PNP a NPN navíc s bazemi spojenými odpory R2 a R3 moc v lásce, protože jsou principiálně nebezpečná. Proud, který vytéká z báze Q6 (jej otevře) vtéká do báze Q2 a taky jej otevře - což hrozí spálením Q2 i Q6. Tady je mezi nimi ochranný odpor R1 a navíc pokud jsou Q2i Q6 otevřené jsou oba Mosfety bezpečně zavřené.
Vstup ENABLE /DISABLE je řešen právě takto - přes Q8 se báze obou tranzistorů zkratují malým odporem a je vyřešeno. Pozorrný čtenář by mohl namítat že tranzistor Q8 se v takto jednoduchém zapojení nemusí dostatečně vybudit napětím 5V. To ale není probém protože emitor Q8 je na napětí báze Q2 které nikdy nebude vyšší než 0,7V takže napětí jeho vlatní báze pro jeho otevření musí být 0,7+0,7 =1,4V. 5V buzení tedy stačí. Tranzistory Q5 A Q7 by tam vůbec nemusely být ale v tom případě by musel R7 být mnohem menší (kolem 1 K) aby stačil vybudit Q2 a Q6 a tím by "protopil" moc proudu. Nezapomínejte, že na schémátku je jen jedna polovina můstku a robot potřebuje alespoň dva můstky pro levé a pravé kolo tedy tento obvod se v robotu bude vyskytovat 4x.
Jak sami vidíte vypadá to až příliš ideálně - klidový odběr můstku je jenom přes trojici odporů R4, R1, R8 kolem 4 mA - ideální jak v telenovele?
Celý můstek včetně vstupu ENABLE je tedy invertující - je-li na vstupu 5V je na výstupu 0 a naopak. je-li na ENABLE 5 voltů - nikam se nejede protože báze Q2 a Q6 jsou zkratovány a MOSFETy odpojeny.
Zdánlivě to vypadá jako porušení základních specifikací můstku, ale při řízení mikrokontrolérem je jenom filosofický probém jestli řídící procedura bude pin mikrokontroléru zapínat, nebo vypínat.
Takže toto se jeví jako vyhovující řešení, za pár kaček ověřené stavbou, ale zatím není ověřené letitým provozem jako mé předchozí můstky, takže se uvidí ....
Již legendární rada pro blondýny, co dočetly až sem: myslete na to, že klasický "geek" sedící za svým počítačem je dneska obrýlený, urovitý a s mastnými vlasy, ale zítra to může být (skoro)milionář (žejo Kamile) - mnohem s píše než dnešní hezoun, který za pár let bude plešatý, potetovaný a s alimenty kam se podíváš ;-)))
26. ledna 2012 v 5:17 | Petr
Tak nějak mám pocit, že se mi názvy kapitol o H-Můstcích nějak popletly - tedy jsme ve 3. díle boje s fyzikálními zákony na téma jak 5 volty a 1 mA řídit motor s 24 volty a 10 ampéry.
Minule jsem se naznačil labyrint problémů kolem motorů, a teď budu ještě komplikovat.
Tedy - H-Můstek má 2 strany a celkem 4 tranzistory - můstek je možno řídit mnoha způsoby, ale vždy vedou z procesoru do můstku aspoň dva dráty.
Ty mohou mít význam DOPŘEDU DOZADU (jako u REGSERU, který jsme probrali minule) nebo jsou to prostě jen vtupy A a B které spínají levou a pravou stranu můstku Pak platí následující tabulka
| A | B | Výsledek |
| 0 | 0 | Vypnuto stojíme Motor zkratován na zem |
| 1 | 0 | Jedem vpřed |
| 0 | 1 | Jedeme zpět |
1
| 1
| Vypnuto motor zkratován na napájení
|
Můstek typu DOPŘEDU / DOZADU musí mít vyřešenu situaci co dělat když dopředu i dozadu je zapnuto najednou (školní zapojení jako je REGSER při takové kombinaci chytne plamenem). Lidi od počítačů sice tvrdí, že jejich software takovou variantu nikdy nepřipustí, ale povídali že mu hráli, jestli tato varianta není HARDWAROVĚ ošetřena je jen otázkou času kdy bude hořet ;-)
Můstky se signály typu A, B připouští jakoukoliv kombinaci, jsou tedy "Inherently safe" (vnitřně bezpečné), a mají i další výhody, proto jsou mé oblíbené, v mém podání ovšem přidávám ještě vstup ENABLE který pokud je vypnutý odpojí se všechny 4 tranzistory v můstku, což mi umožňuje měřit "Back EMF" neboli "
protielektromotorickou sílu". V principu je takto zapojen i můj milovaný můstek L293D, který pro motory do 0,5A je to nejlepší co můžete do robota dát. (ne že by byl tak super svými parametry, ale vyniká nezničitelností a jednoduchým použitím)
Už minule jsem zmínil že jsem vyrobil celkem 6 generací můstku - od prvního bipolárního LOW Drop přes 5 variant MOSFET. Nejprve jsem si hrál s nábojovou pumpou, ale pak jsem zjistil, že je to opravdu blbost pro robota - jednoduššího než ASIMO nebo nějakého průmyslového co svařuje Korejské Imitace Auta alias KIA vozy - se to nehodí.
Nakonec jsem dospěl k variantě, která se povrchně jevila jako dokonalá. Zde je:
NIkdy jsem nestvořil tak složitý obvod s tak málo součástkami. Trochu probereme co je na tomto můstku tak zvláštní - především je to velmi jednoduché řešení DEAD TIME CONTROL. Jak už jsem psal GATE Mosfetu je kondenzátor. Toho jsem kreativně využil abych řídil spínání mosfetlů. Oba tranzistory se otevírají pomalu (přes odpor R2) ale zavírají rychle tranzistory Q2 a Q6 - tím je zaručeno že jeden tranzistor se otevře až je druhý zavřený - a dokonce pokud dáme tranzistor pro větší proud, který má větší kapacitu gate - je prodleva delší - pro větší proudy - větší odstup - no není to geniální.
Bohužel není. Vstup ENABLE zajišťuje dvojice Q3 Q5, která pokud se uzavřou tak se můstek rozpojí odpory R6 a R5, které při běžném provozu z 24 voltové baterie, hlídají aby napětí na Gate žádného tranzistoru nepřesáhlo bezpečných 20 voltů, si přitáhnou gate k zemi nebo k napájení a můstek se tak zcela vypne.
Skvělá a jednoduchá idea, která báječně fungovala v simulátoru el. obvodů. V praxi ale při vypnutí Q5 je na emitorech Q2 a Q6 buď zem nebo plných 24 voltů. Pokud je na vstupu můstku 1 pak rozdíl napětí báze-emitor tranzistoru Q2 je taky 24 voltů (protože Q7 zkratuje bázi na zem) a tím dojdek tzv.
Lavinovému průrazu báze Q2. Totéž se stane s Q6 pokud je na vstupu 0.
V praxi to vypadá tak že až do 12 voltů je vše skvělé (báze se neprorazí), ale pokud zapojíte můstek na plných 24 voltů a vypnete ENABLE - jeden z dvojice Q2 nebo Q6 se prorazí (lavinový průraz je nedestruktivní takže tyhle dva tranzistory to přežijou) - tím se jeden z Q1, Q3 plně neuzavře, zatímco druhý se díky vybíjení přes odpory 4,7K taky nestihne uzavřít a PRÁSK - je po MOSFETECH (ty už to bohužel nepřežijou).
Naštěstí to nebyla tak drahá zkušenost - ale práce na návrhu plošného spoje je mi trochu líto.
Sám už jsem dneska unaven - takže končím - zbytek probereme příště.
Ještě obyklá rada pro blondýny co dočetly až sem - Latexové minišaty se nemusí žehlit a na diskotéce z vás puboši nespustí oči - do postele je ale neberte - špatně se svlíkají a navíc chlapům příliš připomínají jiný latexový výrobek - prezervativ.
19. ledna 2012 v 4:16 | Petr
Loni na jaře jsem psal o tom že chci své roboty rozpohybovat způsobem jakým se regulují otáčky vrtaček z Lídlu. Tedy pouštět do motorů proud, který na chviličku vypnu a během té chviličky změřím napětí, které motor, v té chvíli pracující jako dynamo, produkuje. Tenhle proud je přímo úměrný otáčkám - tím získám představu o tom jak rychle robot jede i bez čidel, která robotici
obvykle používají.
Pohyb robota obvykle (vždy?) řídí nějaký mikorokontrolér - jednočipový počítač. Mezi mikrokontrolér a motor se zapojuje tzv. H můstek - což je vlastně zesilovač signálu mikrokontroléru, který navíc odděluje citlivou elektroniku procesoru od "elektromagnetického pekla" motoru.
Zjednodušený princip: (nyní nás zajímají jen tranzistory Q1-4). Zapneme li Q1 a Q3 prochází proud motorem od svorky M1 k M2 a motor se točí jedném směrem. Zapneme-li Q2 a Q4 proud jde opačně a motor se točí druhým směrem. Pokud jeden ze zapnutých tranzistorů střídavě vypínáme a zapínáme - motor se točí pomaleji než když proud teče nepřetržitě (tento způsob se obvykle označuje jako PWM - pulzně šířková modulace). U robotů je navíc důležité otáčky regulovat, proto mikrokontrolér snímá otáčky a podle toho řídí směr a dobu zapnutí tranzistorů, takže robot když najede na překážku mikrokontrolér v setině sekundy "přidá plyn" aby rychlost zůstala konstantní. Atd atd - tuny diplomek a dalších papírů kolem toho byly popsány ...
Když řídíte malý motor můžete (a je to pro konstruktéra pohodlnějši) použít bipolární tranzistory (NPN a PNP). U Velkých motorů bývá s bipolárními tranzistory problém protože proud budící trantzistor by ideálně měl být asi 1/10 proudu motorem - takže takový velký bipolární můstek je proudožravý bumbrlíček.
Proto se používoají MOSFETY kde tranzisor otvíráte napětím a jediný proud který potřebujete je proud na nabití kapacity hradla. Neboli hradlo alias "báze" MOSFETU se tváří jako kondenzátor s kapacitou od několika piko až do 10 nanoFaradů.
Aby to nebylo tak jednoduché tak tak jako máme bipolární tranzistory NPN a PNP tak máme N- a P-Mosfety. Vzhledem k tomu, že N-mosfety se používají častěji (i NPN se mi zdají populárnější) je N-Mosfetů vetší výběr, pro větší proudy, za menší peníze atd. Proto mají konstruktéři tendenci udělat celý můstek z N-MOSFETů, jako na obrázku.
To ale naráží na problém s buzením "horních" MOSFETů, který aby se plně otevřely potřebují napětí 5-10V vyšší naž napětí na motoru a tedy 5-10V více než je napětí baterie. Proto, pokud se staví můstky se 4 N-Mosfety, používají se nábojové pumpy. Jejich princip je naznačen vpravo (ten labyrint kondenzátorů a diod). Nábojová pumpa je často součástí budícího integrovaného obvodu.
Můstky s nábojovou pumpou jsou skvělé, pokud neustále kmitají, ale ne pro roboty, kteří se přece jenom občas potřebují zastavit, tím nábojová pumpa (jako součást budícího obvodu) přestává fungovat, a musí se přidávat nábojová pumpa pomocná, krerá pumpuje neustále a zapojení se tím stává monstrem.
Proto se pro roboty často používají zapojení s N a P Mosfety.
Na obrátku je můstek zvaný REGSER, ktery vymysleli lodní modeláři pro pohon lodiček s velkými motory. Všimněte si že můstek pokud se současně zapne dopředu i dozadu najednou otevřou se všechny čtyři tranzistory, zkratují baterii a můstek shoří, tomu je v originálním schematu zabráněno tím, že můstek spínají proti sobě (antiparalelně) zapojené optočleny, které tedy nikdy nemohou svítit oba najednou.
Tím jsme narazili na další problém mezi vypnutím jedněch a zapnutím druhých tranzistorů by měla být nepatrná chvilkla pauzy, protože jinak hrozí že zapnutí a vypnutí se budou (o desetinky mikrosekundy) překrývat a tím v napájení robota vzniknou velice rušivé proudové špičky, které mohou resetovat procesor atd. V anglické literatuře se tomu říká DEAD TIME CONTROL.
Tedy opravdu - dábel se skrývá v detailech. Jen pro zopakování pokud se týká řízení motorů je problém
- Jak motory zapínat
- Jak motory vypínat
- Jak motory odrušit
- Jak řídit tranzistory
- Jak řídit celý můstek
- Jak řídit otáčky
- Jak bojovat s elektromagnetickým rušením vně můstku
- Jak chránit můstek proti zkratu
- Jak chránit baterii proti proudovému přetížení a hlubokému vybití
- Další, které mě teď ani nenapadají !
Není divu že většina robotiků používá můstky jako integrované obvody. Výrobci těchto obvodů vědí, že nmůstek z tranzistoru jen tak někdo postavit neumí, proto si je (jako integrované obvody) nechají řádně zaplatit, právě proto a ještě z důvodu měření napětí na motoru jsem se vydal cestou konstrukce vlatního můstku, která po 6 generacích !! dospěla do fáze, kterou probereme příště.
Ještě obvyklá rada pro blondýny, co dočetly až sem : Jestli nemáte - kupte si do postele černou paruku - nic tak chlapa nevzruší jako "cizí ženská v posteli" a nic tak ženu neuklidní, jako když přitom má "toho svého pod kontrolou" ;-)))
12. ledna 2012 v 3:27 | Petr
Koncem Bolševika (po roce 1985) nastala zvláštní situace, kdy na západě jelo VHS video a a ZX Spectrum a u nás vždycky před vánocemi vystoupil v televizních "Aktualitách" borec s mastnými vlasy a vysvětloval, že všechno bude až se vyřeší problémy se "součástkovou základnou" - jakože nikdo neumí vyrobit potřebné čipy. a taky probémy s "dodavatelsko odběratelskými vztahy" - jakože všechno v
RVHP stejně sežerou Rusáci.
Pak kolem 2000 bylo období kdy v česku bylo všechno, v
GM elektroniku jste si mohli koupit širší spektrum součástek než Steven Jobs (nebo jsem měl aspoň takový pocit). Nicméně už tehdy se objevovaly varovné známky - například můj oblíbený
Harry Lythall žijící ve Švédsku úplně vážně doporučoval koupit laciné čínské rádio a nové jej rozebrat na součástky, které se jinak nedají za rozumnou cenu koupit.
Pak se GM elektronik (a si ním i jeho konkurence) přeorientoval na prodej varných konvic - a je vymalováno - cokoliv potřebujete už neseženete - v Ostravě například už půl roku není ani NE592 - zesilovač do 70 MHz. Nebo to seženete ale za ceny ze kterých se podlamují kolena - např. zesilovač LT1223 který bych moc potřeboval je +- za 300 a co když potřebuju 4 kusy ???
Poznámka pro Karla M., abych mu ušetřil psaní do diskuse - Karle - vím o TME, RS, FARNELLU, nebo dokonce DEALEXTREME a dalších zásilkových službách, ale nepoužívám je úmyslně, protože jim chybí - ta základní kvalita - když ráno při tlačení na záchodě chytneš ideu - odpoledne koupíš součástky - a večer už víš jestli to bylo dobré nebo blbost.
Takže jak jsem psal v přechozí kapitole o
Trávoměru, dostal jsem se do situace, kdy jsem potřeboval postavit rádio superhet, které místo antény má fotodiodu.
Nejprve trochu teorie - fotodioda je zapjená v obvodu v nepropustném směru - tudíž má obrovský vnitřní odpor - kdysi byla tendence měřit na fotodiodách napětí pomocí elektroniky která má ještě větší vnitřní odpor.
Pak si někdo uvědomil, že fotodioda je vlastně zdroj proudu, a že proud se měří ampérmetrem, který má malinký vnitřní odpor. Protože i proud fotodiodu je malinký tak se měřil na tzv. snímacích rezistorech asi takto.

Pokud na fotodiodu bliká světlo - mění se proud fotodiodu třeba o 1 nA (nanoAmpér) a tím se napětí na svorce 1 mění o 10 uV (mikrovoltů). Problém je v tom, že fotodioda aby byla dosti citlivá musí mít dosti velkou plochu. Moje milovaná BPW34 má 7 mm čtverečních což je více než celý čip současných mizerných (14 MegaPixelových) digitálních foťáčků !! Taky výrobce ani neudává citlivost a jen v aplikační poznámce srovnává fotodiodu s foťákem tím že konstatuje, že odhadovaná citlivost je kolem 256 000 ASA. Dioda 7 mm2 velká má nezanedbatelnou kapacitu - asi jako kondenzátor na pravé část obrázku - a tudíž při vyšších frekvencích její vlastní kapacita odfiltruje signál do země. Např na pravé části je hraniční frekvence kolem 160 KHz - což nevadilo u Trávoměru který měl pracovat na 10 KHz ale už to bylo smrtelné pro Trávoměr na 1 MHz.
Proto se používají tzv.
Transimpedanční zesilovače - které se ze strany fotodiody tváří jako ampérmetry s (téměř) nulovým vnitřním odporem a z druhé strany se tváří jako zdroje napětí taky s (téměř) nulovým vnitřním odporem. Díky nulovému vnitřnímu odporu na vstupu jde proud z fotodiody do země raději přes zesilovač než by se prodíral kapacitou diody (silně zjednodušuji). Díky (téměř) nulovému vnitřnímu odporu není vliv kapacity diody na frekvenci snímaného signálu tak drastický jako u snímání proudu prostým odporem.
Tedy vezměme schéma vlevo nahoře - když se proud fotodiododu zvětší - klesne nepatrně napětí na invertujícím vstupu operačního zesilovače a tím stoupne napětí na výstupu. Protože z definice operační zesilovač má nekonečný vstupní odpor - z invertujícího vstupu žádný proud neteče - tedy veškerý proud teče odporem 10K - operační zesilovač "cvičí" s napětím na jednom konci odporu aby poskytl fotodiodě jakýkoliv proud si žádá - tudíž napěťové změny na diodě jsou (téměř) nulové, což se diodě jeví jako nulový vnitřní odpor. Dovoluji si upozornit že transimpedanční "zesilovač" nemá žádné zesílení - tedy signál 1 nA se opět změní na napětí 10uV jako u verze jenom s odporem ....
Dostáváme se k neuvěřitelným věcem a k meritu článku - Všechny 4 zapojení jsou, pokud nemáme přiliš velké nároky, stejné. Všechny jsem vyzkoušel a proberu proč jsem skončil u neuvěřitelné poslední verze vpravo dole.
- Operační zesilovač - zde JFETový TL072 - je nejlepši "učebnicové" a klasické zapjení, které je vhodné asi tak do 100 KHz. Fotodiody mají především proudový šum proto je vhodné používat unipoládní (JFET, CMOS) součástky, které tím že mají nekonečný odpor hradla (žádný proud do nich neteče) nezvyšují šum fotodiody - jediným zdrojem šumu je pak fotodioda a transimpedanční odpor, který má být co největší
- Pokud potřebujeme snímat z fotodiody signál o vyšších frekvencích než nám umožňuje operační zesilovač je možno pořídit rychlejší zesilovač - TL 072má šířku pásma 3 MHz, nejrychlejší "běžně dostupný" zesilovač NE5534 má 10 MHz - což není o tolik více a navíc je bipolární a tudíž z hlediska šumu pro fotodiodu nevhodný (i když je inzerován jako extrémně nízkošumový). Když už jsme nuceni jít k bipolárnímu řešení je možno pouřít tranzistorový bipolární zesilovač (vpravo nahoře). Pokud použijeme opravdu rychlý tranzistor, třeba můj milovaný BF199 můžeme jít s frekvencí až na 10 MHz. Problémem tohoto zapojení je však šum (menší než z NE5534) a navíc toto zapojení má výstupní odpor 1K ohm (díky R3), které se přenáší na vstup který tedy nemá vstupní odpor 0 ale taky kolem 1K Ohmu - což je důvod proč nelze s frekvencí jít výše i když BF199 zvládá stovky MHz,
- Stále je ještě možno použít superrychlé operační zesilovače jako zmíněný LT1223 za 300kč, který díky tomu, že má proudový výstup zvládá frekvence až 100 MHz, ale dá se takové zapojení otisknout v Amatérském rádiu s poznámkou "milá děcka - poproste tatínka ať vám místo nového mobilu koupí pytlík LT1223 ?" (proto jsem si neobjednal LT1223 u Farnellu KARLE). Stále je možno udělat něco zvláštního a použít neočekávané součástky - takže jsem si přečetl tuto aplikační poznámku od Fairchildu. a začal jsem používat invertory 74HC04 jako vysokofrekvenční analogové zesilovače. Zapojení vlevo dole je vyzkoušené a spolehlivě funguje až do 50 MHz - navíc 74HC04 je CMOS - tedy odolný k proudovému šumu a navíc za 4 Kč koupíte pouzdro, kde je jich 6 - Tedy drahý Lineare strč si LT1223 do .......
- Schéma jednoho zesilovače ze pouzdra 74HC04 je na obrázku. Někteří výrobci jako třeba Phillips dávají dokonce tři takové dvojice tranzistorů za sebe aby změny na výstupu byly rychlejší - zesilovač postavený z tohoto hradla má šířku pásma kolem 100 MHz - což neznamená, že byste mohli používat 74HC04 pro digitální signály této frekvence (tam jsou potřeba ostré hrany a proto cesta pro digitální signál musí mít aspoň 5x větší šířku pásma než pro sinusovku stejné frekvence). Nakonec se mi zesilovač ze 74HC04 přece jenom nelíbil protože na mé pracovní frekvenci 10.7 MHz už přece jenom nemá takové zesílení - musí se z nich dělat kaskáda, která díky zpožděmím v zesilovači hrozí rozkmitáním atd. Takže jsem prozkoumal jak vypadají CMOS NAND a NOR Hradla (jsou skoro stejná)
- Všimněte si že Q3 a Q4 tvoří kaskódové zapojení - díky tomu má Q4 mnohem větší zesílení a lepší frekvenční charakteristiku než tranzistory v 74HC04 - takže jsem přešel na 74HC00 - který je za 5 Kč v pouzdře jenom 4 ale pořád lepší než LT1223. Díky vyššímu zesílení jsem dokonce mohl odpor transipmedančního rezistoru R5 zvýšit z 10K na 100K a tím se zase trochu vyhnout šumu. Navíc se signál přivádí na oba vstupy hradla což způsobí, že "sčítáním" proudu všech tranzistorů hradla je šum ještě menší.
- Teoreticky ještě lepší by bylo použít XOR hradlo - které je dvoustupňové a tím má ještě větší zesílení ale to už hrozí nestabilitou takového zesilovače, takže jsem to ještě nezkoušel.
Tedy co je potřeba abyste mohli použít CMOS logický obvod jako zesilovač ?
- Především to nesmí být sekvenční obvod - jakýkoliv klopný obvod nebo jakýkoliv který si pamatuje minulý stav.
- Nelze pužít obvody s hysterezí (schmidtovy klopné obvody alá 74HC14)
- Je nutno použít obvody invertující aby se přivedením napětí z výstupu zpátky na vstup obvod sám uvedl do lineárního stavu.
- Počátejte s tím že ač CMOS tak obvody v lineárním režimu dost žerou - klidně i 10mA na hradlo tedy 60 mA na celý obvod - a čím menší signál zpracovávají (méně kmitají) tím více žerou.
- pozor na přednos signálu mezi hradly (uvnitř čipu) - nikdo z výrobců s takovým použitím nepočítá takže operační zesilovače mají útlum mezi zesilovači klidně i 120dB - HC00 má kdoví kolik - podle mých zkušeností dosti málo takže od jisté frekvence už ani nepotřebujete vnější vazební konenzátory - bohužel ;-((
Tak děcka teď víte kam může zahnat konstruktéra sučasná nadvláda peněz nade vším - jelikož se už v česku přestaly prodávat ultrazvukové mikrofony a reproduktory do mých robotů - doufám, že kapitola Trávoměr 99 nebude o tom že na prahu mé penze se přestaly prodávat fotodiody a tak nahrazju BPW34 infračervenou LEDKou "vyštípanou" z televizního dálkového ovladače. (což je fyzikálně reálné)
Mějte se dobře - blondýny ať si nezapomenou naleštit jehlové kozačky (což je jediná obuv mnou doporučovaná do postele) a chlapi ať se těší na další pokračování....