Vidlákovo Elektro
13. prosince 2012 v 4:28 | Petr
Nadpis vypadá jako reklama na obchod s kuchyňským vybavením, ale už minule jsem psal proč nemám rád české slovo směšovač.
Představte si, že zajdete do místního ghetta a naším přepracovaným, utiskovaným spoluobčanům tam šlohnede 2 z velepočetných satelitních antén. Ani nebudete potřebovat celou anténu, ale bude vám stačit satelitní konvertor - alias LNB. To je anglicky
Low noise downconverter, neboli směšovač 11 GHz satelitního signálu na 1 GHZ signál, který se koaxem dá rozumně pustit do satelitního přijímače.
K čemu vám budou 2 LNB ? LNB se dá použít i jako Up converter a tedy vysílač. Takže si představte tu idylku - ze zvukové karty notebooku vám vede modulační signál do LNB, které vysílá na 10 GHz, odraz přijímá druhé LNB, konvertuje jej zpět na akustickou frekvenci, která vede zpátky do notebooku.
Co se s takovou sestavou dá dělat - cokoliv - měřit rychost robota pomocí Dopplerova posuvu, měřit vzdálenosti překážek Dopplerovským radarem, mapovat okolí, prostě cokoliv co se dá udělat (dobře postaveným) ultrazvukem, nebo SICKem ale za hubičku (jestli utečete našim etnickým bratřím).
Proto mixování signálů, které je dnes velmi moderní a prakticky jediná stále ještě (částečně) analogová operace - je z hlediska elektroniky pro mobilní roboty - dřímající a nevyužitý poklad.
Jak už jsem
psal minule ačkoliv směšování naznačuje součet - je to ve skutečnosti
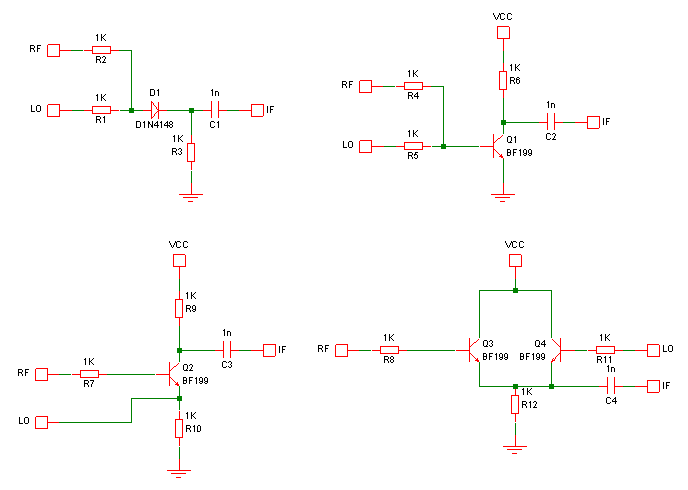
NÁSOBENÍ dvou signálů. Jenomže najít mezi součástkami nějakou, která nám vynásobí dva signály - není tak snadné, takže velice často postupujeme tak že dva signály sečteme a pak je vedeme do nějaké nelineární součástky - jako je třeba dioda - a ta nám na "
koleně své charakteristiky" signály vynásobí. Přesně tak jak to vidíte na schémátku vlevo nahoře.
Než budeme postupovat dále musím vysvětlit zkratky RF - Radio frequency - vstupní signál. LO - Local Oscillator - signál, kterým vstupní signál násobíme. IF - intermediate frequency - to je ta "mezifrekvence" neboli pro nás výstupní signál.
Takže jak to funguje - vztah mezi napětím a proudem na diodě je exponenciální. Exponenciální křivku můžeme pomocí mocninné řady napsat jako součet mocnin. Neboli je-li na diode proud I bude napětí
U = a0 + a1*I + a2*I2 + a3*I3 + a4I4....
koeficienty aa1, a2, a3, a4, ax - jsou typické pro danou funkci a vlastně nás nemusí zajímat, pro nás je podstatné že U je úměrné I2 Takže jako na schémátku proud vytvoříme součtem signálu RF a LO. Pak bude napětí na výstupu
IF = (RF + LO)2 = ( RF2 + 2RF*LO + LO2)
Jednoduché jako facka na hodině matematiky.
Mimochodem vidíte tam to násobení signálů - 2 * RF * LO - Protože každá polovodičová součástka má nějakou nelinearitu, tak jsem vám takových mixérů namaloval hned několik - vpravo nahoře to samé s tranzistorem. Pokud potřebukete RF zesílit, ale LO je dosti silné (častá situace v rádiu) tak použijete zapojení vlevo dole, pokud máte RF i LO dosti silné pak je nejlepší zapojení vpravo dole. Všechno je jenom naznačené, bez konkrétních hodnot součástek.
Dobrali jsme se k násobení signálu, ale učebnice na průmyslovce pořád otravují s nějakými součtovými a rozdílovými frekvencemi - a k těm se přes daší dva vzorečky (za které se omlouvám) dobereme nyní. Takže představme si že RF a LO jsou sinusové signály pak platí, že
sin (RF) * sin (LO) = 0,5 * ( cos (RF-LO) - cos (RF + LO) )
Vidíte tam to RF - LO a RF + LO ? Kdybych si to takhle mohl přečíst už v roce 1982 necítil bych se 30 let jako trotl než jsem si to odvodil sám ...
Když ještě dosadíme do "rovnice mixéru" dostaneme
( sin (RF) + sin (LO) )2 = sin2(RF) + cos (RF-LO) - cos (RF+LO) + sin2(LO)
Jinými slovy do směšovače jdou dvě sinusovky sinusovky.... a ven leze bordel ....
Klidně bych ještě pokračoval, ale výjimečně mám pocit, že tentokrát čtenářové jsou u konce svých sil, takže si dáme radu pro brunety a pokračujeme příště : Když už máte mnou doporučovaný "převlek za blondýnu" - do postele - zkuste jej někdy v upravené verzi vzít i mezi lidi - uvidíte, že se k vám úplně jiný typ lidí bude chovat úplně jínak. V žádném případě to ale neneberte tak, že vás nabádám abyste v převleku za blondýnu zahnula svému miláčkovi !!!.
6. prosince 2012 v 5:40 | Petr
Děcka - je mi to jasné - můžete chrlit slova typu PI** a KU*** i mnoho dalších, ve stovkách za minutu, ale mezi mládeží neexistuje sprostější slovo než "MATEMATIKA". Nicméně jsem ve 22. díle vidláků přišel na to co jsme měli probrat v 1. díle, protože se o tom skoro žádná literatura nezmiňuje, a pokud se to probere výslovně neboli "na plnou hubu" ušetříme si tím spoustu zmatků.
Takže když si otevřete nějakou "elektroniku pro učňák" tak v kapitole zesilování najdete, tak maximálně že to je řízení silného signálu slabým signálem a to je tak všechno. Proto abyste eventuelně dostali jedničku u tabule je to dost, ale pro pochopení jako obvody fungují, nebo dokonce pro jejich konstrukci je to žalostně málo.
Tedy: ANALOGOVÁ elektronika se jmenuje ANALOGOVÁ protože signály v obvodech jsou ANALOGIÍ dějů v reálném světě. Operní zpěvačka vříská na 4 kHz a my máme na osciloskopu "pokroucenou sinusovku" s amplitudou 1 Volt a frekvenci 4 kHz. Robot je od překážky metr - máme signál 5 Voltů, robot je od překážky 5 metrů - máme signál 1 Volt. Zatím jasné ?
Vtip je v tom, že my se signály vykonáváme různé operace, zesilujeme, zeslabujeme, fitlrujeme, mixujeme, a tyto operace s analogovým napětím mají svoji ANALOGII v matematických operacích s čísly.
Takže odporový dělič - už podle jména - dělí signál konstantou.
Zesilovače - z matematického hlediska - násobí signál konstantou.
Zesilovače s proměnným zesílením - Násobí signál proměnnou.
Usměrňovače - dělají absolutní hodnotu
Komparátory - porovnávají dvě hodnoty.
Invertory - násobí signál -1.
Ale pak začíná trochu zmatek
RC filtr - je elektronický ekvivalent exponenciálního klouzavého průměru - co to je ?
Přiklad numerického klouzavého filtru
Prumer (n) = 7/8 * Prumer (n-1) + 1/8 * Nova_Hodnota
LC filtr - nemá jasný matematický ekvivalent, ale vztah proud kontra indukčnost je ekvivalentem vztahu hmotnost kontra síla (zrychlení ) z fyziky.
Proč o tom vlastně píšu - když je to tak jasné? Bohužel moc jasné to právě není.
Co je to
SMĚŠOVÁNÍ ? Cituju
Wikipedii: "
Směšovač je obvod, ve kterém smísením přijímaného signálu a signálu místního oscilátoru vzniká součtový a rozdílový kmitočet"
Ta co je to směšování A + B ? Nebo pokud se jedná o harmonické signály tak
sin (alfa) + sin (beta)
Jak ale vzniknou ty "rozdílové a součtové kmitočty". Sčítáním určitě ne - protože směšování - světe div se je NÁSOBENÍ dvou signálů. Česká elektronická terminologie úspěšně mate. Kromě násobení kterým vznikají součtové a rozdílové kmitočty tu máme "obvod se společným kolektorem" známý jako Emitorový sledovač atd.
Proto raději místo českého směšování používám otrocký překlad z angličntiyn - mixér - při představě mixéru je jasnější, že je to rozsekání jednoho signálu jiným signálem.
Jasně blondýny si už myslí - stréc vidlák se opájí jazykovou onanií, ale uvědomit si souvislosti má smysl : Mixování je násobení dvou signálů - zesilovač s proměnným zesílením také násobí jeden signál jiným ano ! Ano - a taky dobrý mixér se dá použít jako napětím řízený zesilovač.
Usměrňování je absolutní hodnota ze signálu - takže kladné hodnoty násobíme 1 a záporné násobíme -1. Dá se mixér použít k takovému násobení ? Anooo !!! Jak získáme signál 1 a -1 - zesílením vlastního signálu až do saturace kde máme 5 a -5V a pak mixováním s původní nezesílenou formou ? Anooo. Dá se takhle usměrňovat Anooo.....
Takže smysl je v tom, že pokud převedeme eklektronické obvody na jejich "
matematický základ" nakonec zjistíme, že všechno se vším souvisí, protože v matematice taky nakonec skončíme u několika
axiomů, ze kterých se dá všechno odvodit. Proto stačí mít v hlavě dokonale zažitých pár schémátek a postavíte od zapalování do Tráboše, po časovač k bombě všechno.
Zbývá už jenom tradiční rada pro brunety. Pokud je váš miláček chytrý a čestný - patrně bude mnohem chudší než miláček vaší kámošky, který je blbý ale svině. Přesto bude patrně bohatší než miláček jiné kámošky, který je blbý ještě k tomu čestný ....
18. listopadu 2012 v 4:53 | Petr
Kromě pasivních dolních propustní, jejíž velmi primitivní variantu
jsme už probírali existují i dolní propusti se zesilujícím prvkem. Učebnicové příklady často používají jako aktivní prvek operační zesilovač, proto pro základní orientaci si ukážeme standardní zapojení
Butterworthovy doní propusti 2 řádu, kterou budeme dneska probírat.
Jasné ne ? Dělící kmitočet je jak byste očekávali
f= 1 / (2 * pi * R * C)
Zatímco nornální RC filtr má útlum vysokých frekvencí 3 decibely na oktávu, tento filtr je druhého řádu (tedy jako dva filtry za sebou) tudíž má útlum 6 db na oktávu, neboli nad maximální propustnou frekvencí s každým zvětšením kmitočtu 2x klesne amplituda signálu 4x - jednoduché jako facka na hodině matematiky.
Jak je možné, že mně - vidláka, co mu je i koruna za tranzistor líto - zaujala "dolní propust 2 řádu", dokonce v "učebnicovém zapojení" ? Vtip je v tom, že aktivní prvek nemusí být jenom operační zesilovač, ale často stačí obyčejný tranzistor
Takže pokud máme výstup nějakého obvodu (zde jen demonstračně naznačen Operační Zesilovač TL072) často nám na výstupu zůstane nějaké stejnosměrné napětí, které musíme oddělit kondenzátorem C1, abychom mohli signál zpracovávat další elektronikou s jinou stejnosměrnou úrovní.
Osobně toho často využívám a zbytkové stejnosměrné napětí používám k buzení emitorového sledovače, který slouží jako oddělovací stupeň bráníci zpětnému průniku signálu. Oddělovací kondenzátor následuje až pak - viz prostřední obrázek. Tranzistor si můžu dovolit zapojit takto přímo, protože díky zpětné vazbě přes R1 má obrovský vstupní odpor přibližně beta * R1, kde beta je proudové zeílení (60-400) u dnečních tranzistorů. Vstupní odpor tranzistoru, tak jak jej máme nakreslený je kolem 300 kohm - pro žádný obvod není problém jej budit.
Pokud emitorový sledovač spojíme s Butterworthovou dolní propustí - vznikne schémátko vlevo. Všimněte si že R3 a R4 spolu s kondenzátory jsou zapojené naprosto stejně jako u učebnicového schémátka nahoře. Pokud využijeme stejnosměrné úrovně na výstupu předchozího obvodu - je to frekvenční filtr "skoro zadarmo"
Jediný drobný problém je s vstupním odporem - díky RC prvkům je nejjednodušíí považovat vstupní odpor pouze za hodnotu R3 - v našem případě tedy 10 kohm. Filtr tak jak je nakreslený má dělící frekvenci 590 kHz a slouží mi jako předfiltr před keramickým filtrem 455 kHz v trávoměru.
Poslední otázka, která zbývá - je proč nepoužít rovnou Operační zesilovač ? Jednak pro vysoké frekvence kolem 400 KHz už začíná být s Operačními zesilovači "za bůra" problém. Pokud použijeme single - operační zesilovač v jednom pouzdře - zabereme proti SMD tranzistoru moc velkou plochu plošného spoje, a pokud použijeme více OZ v jednom pouzdře - často se musíme se signálovými cestičkami "vracet" k pouzdru OZ a tím riskujeme, že nám zesílený signál bude rušit třeba vstup obvodu, proto je někdy tranzistor ve vzdáleném rohu desky lepší než čtyřnásobný operační zesilovač uprostřed.
Zbývá jenom oblíbená rada pro brunety - když nastane zima celebrity oblíkají norkový kožich na nahé tělo - vy jste však ženy inteligentní a víte, že větší počet tenkých vrstev hřeje lépe - a taky svlíkání 4 zpocených mikin, před sexem, je daleko dráždivější, než nudné cinkání diamantů a závan Chanelu 5.
11. listopadu 2012 v 2:56 | Petr
Než se vrhneme do druhé kapitoly o logaritmických zesilovačích jen rekapitulace - je to veliký byznys a proto najít pravdivé informace prakticky nelze. Je veliká skupina logaritmických zesilovačů využívajících logaritmické závislosti mezi napětím a proudem na (diodovém nebo tranzistorovém) PN přechodu, ale ty jsou pro robotika většinou k ničemu. Pak jsou logaritmické zesilovače založené na kaskádě lineárních ale limitovaných zesilovačů, a těmi se budeme zabývat dnes.

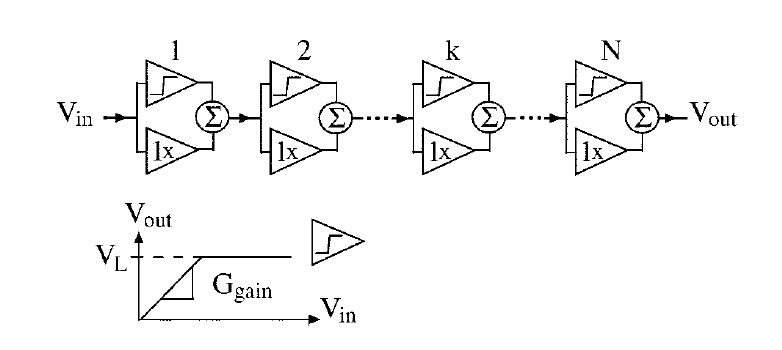
Nejprve tedy teoreticků úvod - jak to funguje - na schémátku vidíme že signál prochází řetězcem zesilovačů, takže nakonec se některý zesilovač zahltí a všechny za ním budou taky zahlcené. To nám naznačují sinusovky nakreslené dole. Vtip je v tom, že zahlcené stupně už nezesilují. Takže silný signál bude zesílený jen některými, zatímco slaboučký signál bude zesílen všemi zesilovači. Takže zesílení celé kaskády v závislosti na amplitudě signálu bude asi takové

Nezdá se, že by to byla logaritmická křivka - spíše zalomená úsečka. Ale pokud výsledek logaritmujeme a nakreslíme v logaritmické stupnici - přece jenom logaritmus (přibližný) nakonec dostaneme.

Zde je moje vlastní simulace v excelu pro různé stupně, čím více stupňů tím větší rozsah signálů zesilovač zpracuje a tím přesněji leží výsledek na logaritmické křivce, na druhé straně tím je zesilovač nestabilnější. TAkže existují extrémní případy 12 stupňových logaritmických zesilovačů, ale ty jsou možné a stabilní jenom uvnitř čipu, pokud se pokusíte je postavit parazitní parametry obvodu vám z nich udělají kmitající zmetky.
Jenom poznamenám, že 120 decibelů - tedy zpracování signálu v poměru 1: 1000 000 (milión) je špička, a i logaritmování v rozsahu 1: 100 000 nebo 1: 10 000 se považuje za slušné.
Přesto jsou tyto zesilovače spojené s amplitudovou demodulací signálu v jistém smyslu pro mně nedostatečné - stále mám ambici měřit světlem i vzdálenost a proto nechci přijít ani o informaci o fázi signálu, která se demodulací ztrácí, proto existuje třetí a poslední kategorie logaritmických zesilovačů zvané
Video Logarithmic amplifiers.
Videozesilovače jsou vždycky širokopásmové zesilovače, většinou od 0 Hz do nekolika MHz a v našem případě až třeba do pár GHz. Tyto zesilovače jsou konstruktérův sen - na výstupu je frekvenčně i fázově nezkreslený signál (jenom zpožděný o konstatní čas) jehož amplituda je logaritmem amplitudy původního signálu - lze si přát více ? Noc s Megan Fox ?
Proč nejsou tyto zesilovače v každém Amáru ? Protože jejich výroba je moc dobrý kšeft pro dodavatele speciální elektroniky pro vojsko, čipy do mobilů, digitální signálové procesory atd - velký byznys = málo pravdivých informací.
Tudíž jsem narazil na jediný zdroj užitečných informací - už minule zmíněné
PDF.
Zesilovače které jsem popisoval doposud byly tzv succesive detection - tedy zesilovače s postupnou detekcí, zde však máme succesive compression - zesilovač s postupnou kompresí signálu, které fungují v sériové a paralelení variantě
Sériový zesilovač vidíte na obrázku - je to vlastně série dvojic zesilovačů - jeden zesiluje 3x - 20x a druhý jenom 1x. Pokud se zesilující zesilovač zahltí - zahltí se i všechny za ním, ale signál i přesto přenese řada 1x zesilujících zesilovačů až na konec - beze změny původní amplitudy před zahlcením. Nic se tedy neusměrňuje a navíc slabé i silné signály projdou stejnou cestou a mají tudíž konstantní zpoždění - jejich fázi lze po započtení zpoždění použít k měření doby návratu odrazu a tím vzdálenosti překážky.
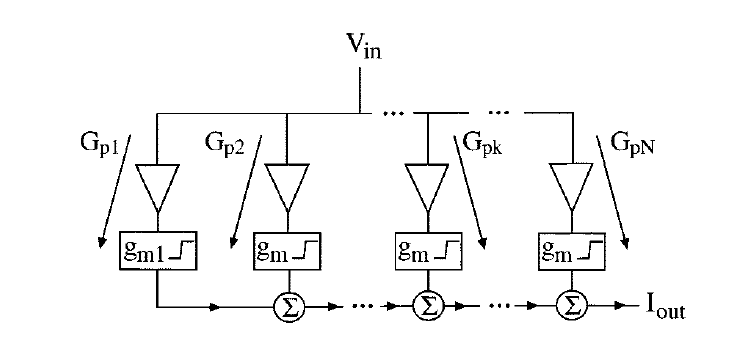
Sériový zesilovač má velký dynamický rozah, je ale složitý,a má tendenci být nestabilní a kmitat, proto existuje i druhá kategorie - tzv paralelní zesilovače, které jsou jednoduché jako schema ze stavebnice "mladý elektronik"
jedná se o to že zcela stejné zesilovače, lišící se jenom zesílením, jsou zapojeny paralelně, takže signál jde minimem stupňů a navíc ve všech větvích stejným počtem a nakonec se všechny zahlcené i nezahlcené větve sečtou - tím vznikne stejný signál jako u sériového zesilovače.
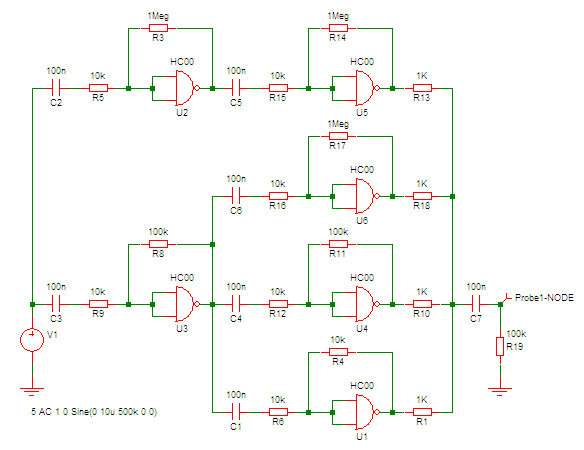
Vysvětlím zde na vlastní variantě stejné věci - signál prochází celkem 4 větvemi, které mají zesílení 10x, 100x, 1000x a 10 000x první 3 používají jako první stupeň zesilovač U3, který zesiluje 10x na jeho výstup jsou zapojené tři stupně zesilující 1x, 10x a 100x. Zesílení 1000x už nelze získat v jednom stupni, proto pro zesílení 10 000x máme celou druhou větev složenou z U2 a U5. signály ze všech 4 větví se sčítají pomocí oddělovacích / sčítacích rezistorů 1K. Celé je to postavené z původně digitálních hradel CMOS 4069 a na tento zesilovač jich stačí 6 - to je jediné pouzdro.
Není špatné obšlehnout Američanům radarovou technologii a postavit ji kolem integrovného obvodu za 4,50 kč ne ;-))).
Tento obvod zpracuje signál 1: 10 000 tedy přibližně od 1V do 100 uV pod touto hodnotou funguje jako obyčejný 2500x zesilující zesilovač. Proč 2500x - porotože celkové zesílení je (10 000 + 1000 + 100 + 10) / 4 tedy zcela přesně přesně 2777,5x takže ani slabší signály nejsou pro zpracování ztracené.
Co dělají konstruktéři radarů když mají signál s větším rozsahem než je rozsah logaritmického zesilovače - zamontují do něktrého předzesilovače Time gain compensation, kterou jsme řešili minule, tím si celý rozsah signálu zmenší. To je pro nás složité, takže můžeme přidat další stupně - to vede k nestabilitě, nebo dát dva takové zesilovače paralelně s předzesilovači třeba 1x a 1000x a jejich výstupy zase sečíst pomocí odporů - stejně jako výstupy 4 větví.
Jednoduché, účinné, laciné, fungující, nekmitající (většinou) připravené pro použití v mojich i vašich robotech. Co si můžeme více přát ?
Tím jsme ukočili seriálek o řízení zesílení a příště probereme něco, co mě napadne až budu mít inspiraci - do té doby jenom oblíbená rada pro brunety - femme fatale je skvělá jako erotická hra v posteli, nebo pro flirt na diskotéce - i když to zní neuvěřitelně i heterosexuální muži občas ocení prostou ženu - kamarádku - tím spíše, pokud je to ta vlastní ....
4. listopadu 2012 v 2:00 | Petr
Když jedete autem a svítíte si dálkovkami tak intenzita světla ve světelném kuželu klesá s druhou mocninou vzdálenosti. Pokud světlo narazí na překážku a odrazí se zpátky směrem k vám - překážka sama se stává zdrojem světla a kužel odraženého světla taky klesá s druhou mocninou vzádlenosti. Druhá mocnina krát druhá mocnina - celková intenzita světla klesá se čtvrtou mocninou vzdálenosti. To je "mrcha radarová rovnice" o které mluvím, co dělám roboty.
Teď nastal čas ohromovat vás čísly : Pokud moje dálkovky osvítí cestu 2 - 300 metrů přede mnou tak to je poměr 1: 150 a poměr světelných intenzit bude 1: 500 miliónů. Radarové rovnici nechce nikdo věřit, protože všichni namítnou ale já přece nevidím v dálce tak blbě. Světlo slabší 500 milion krát je přece čisto-čistá tma.
Není a to ze dvou důvodů
- Retroreflexní prvky - zvané taky odrazky - mají takovou strukturu, že odraz od nich není kužel ale téměř rovnoběžný parpsek světla končící zpátky ve zdroji - takže odraz od nich klesá - téměř- jen s druhou mocninou vzdálenosti, proto se zdá, že v dálce "jasně svítí" proto si ani neuvědomíme, že kolem nich je skoro tma.
- Logaritmická odezva oka - oko vnímá od přímého pohledu do slunce po tmavý les v tmavé nocí - tradičně se tvrdí že to je poměr 27 dekád to je 1: 1 000 000 000 000 000 000 000 000 000 - takže nějaká půlmiliardtina je proti tomu směšná.
Ergo napodobujeme přírodu a nebylo by COOL místo signálu přes deset řádů zpracovávat signál jen přes deset voltů ? Jasně tím by se z téměř neřešitelného problému stala školní úloha pro elektro-průmyslovku.
Takže logaritmické zesilovače jsou všude - příjímače GSM, GPS, WIFI, Bluetooth, Gama korekce v monitorech, optické komunikace po optických vláknech, zvukové karty, ale taky LIDARY, RADARY, dálkoměry, Trávoměry atd ....
Veký byznys - částečně dokonce tajný. Z toho pak vyplývá jediná věc - žádnou rozumnou informaci se nikde nedočtete, protože buď jsou inženýři prohnilí a nic nezveřejní, nebo mají prohnílého managera a ten jim to zarazí.
Je běžné, že narazíte na pár nepoužítelných schémátek a pak na pár - blokových schemat s kolečky a trojúhelníčky - ze kterých nevyčtete nic ..... Celá věc jde tak daleko, že i vědecké články často popisují magické vlastnosti nějaké konstrukce, aniž by jenom naznačily schémátko.
Naštěstí jsem narazil na toto
PDF, které neříká nic, ale dohromady s předchozími nic neříkajícími články mi svitlo.
Přestože jsem o logaritmických zesilovačích psal už v seriálu o Trávoměru - nyní jsem zase starší o půl roku a mám další ne/fungující vzorky - takže všechno vezmu systematicky znovu.
Logaritnické zesilovače - jednostupňové pro pomalé signály:
Nejjednodušší logaritmický zesilovač má ve zpětné vazbě dvě antiparalelně zapojené diody - jeho výkon v oblasti logaritmování je tak špatný, že někteří jej označují spíše za limiter, nebo usměrňovač. O něco lepší je zesilovač s tranzistorem z obrázku, který je silně tepelně závislý a navíc těžko nastavitelný z hlediska správného pracovního bodu tranzistoru.
Proto se používá složitější logaritmický zesilovač se dvěma zcela stejnými tranzistory, který je ale dost složitý.
Tyto zesilovače jsou pro mně (i pro většinu robotiků) nepoužitelné ze dvou důvodů
Jednak jsou pomalé - 10 KHZ by snad šlo ale moje oblíbená mezifrekvence 455 kHz - zapomeňte.
To je však jenom menší problém - větší je že tento velice přesně logaritmuje pomalé signály v milivosltech. Signál v milivoltech mě ale zdaleka tak nepálí mě pálí přesycení AD převodníku signálem ve voltech, nebo naopak úplně hluchý AD převodník se signálem v mikrovoltech. Takže, kdybych chtěl tento zesilovač použít musel bych signál předem upravovat - zesilovat nebo zeslabovat - a tím hrozí, že se nám některý stupeň zesilovače zahltí a máme po legraci.
Proto byly vymyšleny
Logaritmické zesilovače pro střední frekvence:
Zvané taky Succesive detection amplifiers.
To je řada zesilovačů které jsou přes usměrňovače napojeny na výstup. Informace o frekvenci a fázi signálu se nám sice ztrácí, ale výstup zesilovače je roven (přibližně) logarimu amplitudy. Nechtěl jsem o informace o fázi a frekvenci prijít tak jsem tento signál zkoušel zpracovávat z posledního stupně zesilovače, ale se zlou jsem se potázal. Diody v usměrňovačích fungují jako kapacita, která se mění s napětím a navíc i přesycené stupně zesilovačů jsou pomalejší než nepřesycené, a proto se fázové zpoždění signálu výrazně mění s amplitudou. Tím se dostanete do smrtelné spirály, kdy z amplitudy odhadujete zpoždění, amplituda i zpoždění jsou tepelně závislé, mnoho stupňů zesilovače za sebou má tendenci kmitat atd ....
V uvedeném PDFku je klíč k opravdu použitelným logaritmickým zesilovačům, protože jsem opět na kraji sil, pro dnešek končím a vy si PDF nastudujte ať máte pro výklad na příště trochu základ.
Dnešni rada pro brunety zní : chlap je rozhodně raději když náklady za Vaše shoppování nerostou, a když už rostou ať je to raději LOGARITMICKY nikoliv EXPONENCIÁLNĚ - vizte učebnici matematiky s grafy příslušných křivek.
28. října 2012 v 5:56 | Petr
Minule jsme probrali fyzikální svinstvo jménem radarová rovnice díky, které když posíláte signál někam do dálky tak intenzita odrazu klesá se 4 mocninou vzdálenosti - takže když nejbližší a nejvzdálenějsší cíl jsou v poměru
1: 100 odrazy od nich jsou v poměru
1: 100 000 000 - ano 1: 100 miliónům - to nemůže žádná elektronika rozumně zpracovat a proto musí odrazy od blízkých cílů zesilovat méně než odrazy od vzdálených cílů.
Dokonce jsem popsal všech 5 (mně známých) řešení celé situace, které dnes rozvineme do kondrétních schématek. Tedy:
ad 1. problém ignorovat - znamená že budeme mít buď signál přebuzený, nebo žádný, což nemusí vadit zejména tam, kde intenzita signálu nenese informaci, protože měříme třeba čas příletu (sonar) nebo frekvenci odrazu (policejní a další dopplerovské radary)
ad2. Procesor přepíná citlivost - popsal jsem to jako nejužitečnější řešení. a taky ano. Jsou celkem 2 možnosti
- buď máme
útlumový článek alias
dělič, ve kterém tranzistorem přepínáme zesílení - to jsou horní dva obrázky. Ten vpravo je dokonce udělán tak že GAIN 1 přepíná zesílení 1: 2 a Gain 2 1: 4 takže když zapneme oba máme útlum 1: 8. Tohle řešení má dva problémy. Jednak musíme signál nejprve
ZESÍLIT abychom jej mohli
UTLUMIT. Takže se klidně může stát že pri zesílení se nám zesilovač dostane do saturace a my pak budeme zeslabovat už zkreslený signál. Druhá nevýhoda je, že pokud chceme děliče řadit za sebou musíme postupmě zvyšovat jejich odpor abychom předchozí stupně nepřetížili, takže se brzy dostaneme k megaohmovým odporům, které vnášejí do signálu rušení a šum.
- proto je lepší dát přepánání odporů do zpětné vazby zesilovače jako na dolních dvou obrázcích. Ten vpravo s operačním zesilovačem je myslím jasný. Pokud je Q6 uzavřen je ve zpětné vazbě jenom jeden odpor 1K, pokud se Q6 otevře jsou ve zpětné vazbě dva 1K odpory paralelně a zesílení operačního zesilovače je 2x větší. Obrázek vlevo je trošku záhadný, protože kde je druhý odpor do děliče ? Takže když je Q5 zavřený dělá zpětnou vazbu odpor R12 a celkové zesílení je R11 / R12 = přibližně 5x. pokud tranzistor zapneme odpor R12 se nám zkratuje a zesilovač jede na plné zesílení což je přibližně 40x.
Trojku -Time gain compensation - teď přeskočíme a jdeme na
ad4 - AGC - protože AGC má pro roboty opravdu zásadní nevýhody nepředpokládám, že byste jej někdy použili, ale představte si že byste do vstupu GAIN tranzistorového zesilovače vlevo dole místo digitálního signálu 0 a 5V pustili nějaké napětí mezi tím třeba 1V - tranzistor Q5 by se poněkud poootevřel a tím by zesílení nebylo ani 5 ani 40 ale "něco mezi". Ano takto lze napětím regulovat zesílení zesilovačů, ale má to více problémů než výhod - zesílení tranzistoru Q4 totiž ovládá PROUD tranzistorem Q5 a ten závisí nejenom na signálu GAIN, ale i na zesilovaném signálu. Takže zesilovaný signál ovlivňje zesílení sebe sama - to vždy vede ke zkreslení a navíc vztah mezi napětím na GAIN a celkovým zesílením je velmi nelineární.
Ještě jsme neprobrali odkud by se v AGC vzal ten signál pro GAIN, ale to je myslím jasné, prostě bychom usměrnili signál na výstupu kaskády zesilovačů. Protože náš zesilovač je postavený tak že s ROSTOUCÍM napětím ROSTE i zesílení tak bychom usměrněný signál museli nějak převést na záporné napětí (třeba tak že bychom usměrňovali záporné půlvlny), které bychom odečítali od konstantního napětí zavedeného na GAIN -to je celé a takhe to mají i ty nejlacinější 40 let staré ruské tranzistoráky, co už nechce poslouchat ani Vaše babička.
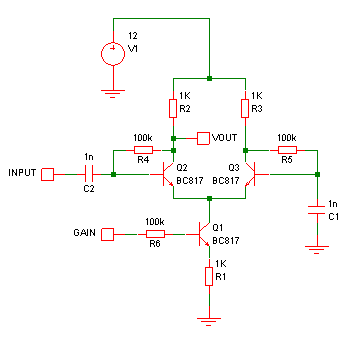
Teď mimo čísla Lze postavit plynulou regulaci zesílení ? Samozřejmě ano a tohle schémátko se tomu blíží když se podíváte tak jsem k tranzistorovému zesilovači přidal jenom druhý tranzistor Q3, oba jsou emitory spojeny a tvoří tzv Diferenciální zesilovač, proud tranzistorem Q1 alias napětí na GAIN plynule řídí proud oběma tranzistory a zesilovač bude fungovat jako z partesu - 0V na gain - žádné zesílení - plné napětí (zde 12 voltů) - maximální zesílení (zde asi 10x) a protože se takových diferenciálních dvojic dá za sebe dát více (nedoporučuju více než 3) lze takhe řídit zesílení až v poměru 1: 1000.¨
Tranzistor Q3 se s Q2 děli o proud a to dělá se zapojením zázraky - ruší závislost zesílení na zesilovaném signálu, linearizuje to vztah mezi napětím na GAIN a zesílením a dá se to využít i ke zpracovávání diferenciálních signálů a o jejich podstatných
Výhodách - viz článeček
o blbuvzdornosti - co bylo řečeno o digitálních - tím spíše platí pro analogové signály.
Vracíme se k bodu 4 - Time gain compensation - zase je vám to už jasné - do GAIN vstupu zesilovače s plynulým zesílením prostě pouštíme postupně se měnící napětí - buď z DA převodníku procesoru, nebo z tzv. Generátoru pily (probereme v budoucnosti) - který produkuje přesně takové stoupající napětí, jaké potřebujeme.
Mimochodem zesilovač s plynulým zesílením je polovina
Gilbert cell směšovače. Všechny směšovače stejně jako zesilovače s řiditelným zesílením vlastně násobí jedním signálem druhý signál. I směšovače se nám do robotů mohou hodit a nakonec všecno "
tak nějak souvisí se vším" a až získáte pocit že ty suvislosti způsobují
UFONI je čas spláchnout zbytek pervitinu do záchodu a jít navštívit nejbližšího psychiatra....
Pro příští díl nám zůstanou logaritmické zesilovače, které jsou kapitola sama pro sebe a protože jsem v nich bádal poslední dva roky mám opravdu co napsat, včetně něčeho ostřejšího na adresu elektronického byznysu...
Dnešní rada pro brunety zní : nejen minisukně ale i kombinace černých legín a minikraťásků dáva chlapům tušit "blízkost pipiny" ale přitom z žádné pozice není nic vidět i kdyby se chlap rozkrájel - uvědomily jste si to ? Víte, že blondýny to vědí (a zneužívají) už dlouho ?
21. října 2012 v 5:16 | Petr
I blondýny někdy běhaly s baterkou po lese a tak je představa robota, který vysílá "nějaké paprsky" a přjímá zpět jejích odraz naprosto samozřejmá a pochopitelná. Pokud však místo čidla, které pro vás postavili jiní chtít postavit vlastní čidlo brzy narazíte na zákeřnost jménem
RADAROVÁ ROVNICE. Ta má ve svém nmejjednodušším provedení tuto formu.
I = I0 / ( Dist / Dist0 )4
kde
I0 - nejvyšší intenzita signálu ve vzdálenosti Dist0
I - intenzita signálu ve vzdálenosti Dist
Takže prakticky - Trávoměr dává signál 3 volty ze vzdálenosti 0,3 m jaký signál bude dávat ze vzdálenosti 3 metry?
Jednoduché jako facka na hodině matematiky -
I = 3V / (3 / 0,3)4 = 3V /104 = 3V / 10 000 = 300uV !!!
Ó hrůzo - čidlo, které dává na blízko solidní signál nedává i na celkem krátkou vzdálenost skoro nic !!!! Pricnip je samozřejmě v tom, že signál klesá se čtvrtou mocninou vzdálenosti a to je opravdu průser. Navíc tohle platí pro každé vlnění - je jedno jestli používátě světlo, laser, infračervené diody, ultrazvuk, nebo třeba opravodový radar v radiovém pásmu.
Takže pokud máte v úmyslu něco vysílat a odraz chytat - počítejte s tím, že rozdíly v intenzitě budou enormní a vy se budete s těmito rozdíly muset nějak vyrovnat.
Pokud dobře počítám existují celkem 5 cest jak situaci řešit.
- Intenzita odrazu mě nezajímá - to je třeba případ ultrazvuku, kde informaci o vzdálenosti překážky přináší čas návratu echa - v takovém případě musím mít v zesilovačích dostatečné zesílení na zpracování signálu z největší možné vzdálenost a smířit se s tím, že ve všech ostatních případech dostanu ořezaný signál. Na podobném principu pracuje i frekvenčně modulované radiové vysílání, kde přijímači je v principu jedno jestli na dané frekvencí dostává sinusovku, nebo obdélníkový (nebo jakýkoliv jiný) signál, protože frekvence nese informaci ne tvar signálu.
- Intenzitu odrazu řídí procesor - velice jednoduchá metoda, kdy podle toho jestli je echo dobře digitalizovatelné si procesor sám nastaví zesílení přijímací cesty - takže má třeba možnosti nastavit zesílení 10x 100x a 1000x a pokus při 10x neslyší nic tak si prostě zesílení zvedne - každému tuhle metodu doporučuju používat co nejhojněji, protože v dnešní digitální době má nejlepší "poměr mezi složitostí a výkonem".
- Intezita odrazu se řídí podle času kdy se odraz vrátí - tzv Time gain compensation - používá se u lékařského ultrazvuku - už předem víme že pokud se odraz vrátí za určitý čas tak to bude z určité hloubky (vašeho břicha) a proto už předem nastavíme zesílení na vhodnou hodnotu. Tento systém je stejně dobrý jako bod 2, ale mnohem složitější na konstrukci, protože většinou vyžqaduje plynule regulovatelné zesílení přes několik řádů - opravdu hardcore konstruktérům dopručuju vyzkoušet, ale sám jsem se tím nikdy nezabýval.
- AVC zvané taky AGC - neboli automatic volume control eventuelně automatic gain control. Signál za zesilovačem se usměrní, porovná s náležitou hodnotou a podle rozdílu se řídí zesílení celé kaskády zesilovačů. Ačkoliv to zní velice složitě tak AGC má každé rádio včetně stařičkého tranzistoráku s 5 tranzistory co vám dosluhuje na chatě. O AGC najdete spoustu informací na Internetu, ale pro použití v robotech nedoporučuju. AGC totiž má "paměť" nejčastěji v podobě kondenzátoru který se nabíjí podle intenzity signálu, takže robot s čidlem postaveným na AGC by musel řešit jestli slabý signál je opravdu slabý, nebo jsou zesilovače utlumené po předchozím silném signálu. To by mohlo být pro robota smrtelné, zatímco stejného zakolísání hlasitosti rádia byste si ani nemuseli všimnout.
- Logaritmické zesilovače - jsou zvláštní obvody do kterých jde signál 1V - 0,1V - 0,001V - 0,0001V atd a ven z nich jde signál 5V - 4V - 3V - 2V atd .... Takže jejich zesílení se mění v širokém rozsahu a dovolím si podotknnout, že smysly živých tvorů dávají do mozku informace v logaritmickém měřítku (proč asi) - takže proto, když si v lese svítíme baterkou rozhodně nám nepřipadá že světlo z 5 metrů je 10 000 x slabší než světlo z půl metru. Postavit logaritmický zesilovač je dosti složité, nicméně někdy je to nutné, zejména v okamžiku, kdy potřebujeme obrovský rozsah vstupních signálů omezit a nemůžeme to udělat z procesoru, třeba proto, že se intenzíta mění příliš rychle - což je můj případ v Trávoměru, proto se s logaritmickými zesilovači drbu už půl roku. Na rozdíl od AGC nemá logaritmický zesilovač paměť a tudíž procesor je schopem se ze signálu na AD převodníku dopočítat okamžité hodnoty vstupního signálu.
Pro dnešek končíme, konkrétní schémátka probereme příště.
Na závěr ještě oblíbená rada pro blondýny : Proč je lepší mít chlapa, který se zajímá o roboty než chlapa, který se zajímá o fotbal ? Z chlapa co mu táhne na třicet určitě už špičkový fotbalista nebude, v robotice má až do začátku stařecké demence šanci otevřenou (i po ní, jak dokazuju na vlastním připadě...)
14. října 2012 v 5:19 | Petr
Můj "tvůrčí proces" spočívá v tom, že po dopsání blogu, brzy ráno sedím spokojeně na záchodě a najednou blesk do hlavy - boha jeho vždyť jsem ještě nevysvětlil tohle ... Šok, ale na hodinkách je 6.25 autobus jede 6.33 - nelze nic dělat než za pár dní zase pokorně sednout a psát vysvětlení, co jsem minule zanedbal.
Ještě si pamatuju doby kdy se CMOS součástky dodávaly s nožičkami zkratovnými alobalovou fólií. Se všemi bezpečnostními opatřeními proti statické elektřině se zapájely, pak se teprve alobal pracně maličkou pinzetou odstraňoval a pak jste se museli hodně modlit aby vám byli elementálové příznivě naklonení a obvod fungoval.
To už dneska není nutné, CMOS obvody jsou sice citlivější než bipolární, ale můj - vidlácký - postup i bez antistatického náramku je takový , že vylezu morký z vany, obleču bavlněné pyžamo, sednu na dřevěnou židli, sánu si na topení a jdu trafopájkou !!! pájet SMD Atmely. Nikomu takový postup nedporučuju ba naopak - výslově takový postup zakazuju. Přesto probereme čím to je že se stala taková změna ?

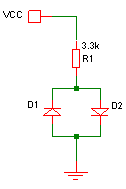
Prostě od jisté doby to výrobce CMOS součástek přestalo bavit vyřizovat stovky reklamací a začali vstupy CMOS obvodů vybavovat ochrannými diodami - jako na obrázku. Co vídíme na obrázku je vlastně celý můj oblíbený CMOS invertor 4069, který používám nejen jako digitální obvod ale i jako analogový zesilovač. Jak jste jistě pochopili diody na vstupu se otevřou pokud se napětí dostane kousek nad napájení, nebo kousek "pod zem" a zachrání citlivá hradla CMOS tranzistorů. Tyto diody mají, boužel, dvě negativní vlastnosti - kapacitu, která (poněkud) omezuje maximální frekvenci obvodu a proud v závěrném směru, který (poněkud) snižuje vstupní odpor obvodu.
Diody vydrží na CMOS součástky poměrně vysoký proud běžně kolem 4 mA, ale jsou i obvody kde ochranné diody vydrží i 20 mA (nutno mrknout do datasheetu). Navíc tyto diody mají zvláštní nectnost - pokud je CMOS obvod bez napájení, ale na vstupech je 5V horní dioda se otevře a proud, který ji prochází udrží obvod ve funkci - tzv parazitní napájení, na které se musí dávat pozor.
Sám si dobře pamatuju jak jsem dostal kopanec od "
kopajícího robota", kterého jsem kolegům pomálal tlačit do skladu. Při tlačení motory ve funkci dynama vyvinuly takové napětí, že přes vstupy se nastartoval procesor, který vydal nějaký nesmyslný příkaz a robot prudce vyjel proti smeru tlačení - všichni jsme byli pokopaní - nikoliv elektricky ale mechanicky pěkně železem (hliníkem) do holeně....
4 mA je na CMOS obvody strašně moc, ale pokud zapojíte na vstup procesrou 12 votovou "olověnku" bude konec. Jak tomu zabránit ? Nejlépe tak, že před vstup předřadíte ochranný odpor - při 12 voltech počítáme jeho hodnotu tako
(12-5 V) / 4mA = 1750 ohm
Tedy 1K8 na vstup a můžete připojit i olověnku. Problém je v tom, že CMOS vstupy mají kapacitu a odporem na vstupu způsobíte zpoždění signálu - v reálu tak 10-20 nano Sekund - to většinou není kritické, ale pokud se pohybujete v pracovních frekvencích přes 10 MHz tak už to může mít vliv.

V horní části obrázku vidíte- jak by to mělo vypadat. Obvod je jenom v náznaku - operační zesilovač aby na svém výstupu pokryl celý rozsah 0 - 5 V musí být napájen z nestabilizovaného napětí akumulátoru, které je 12V, tím se může stát že výstup OZ se dostane až k 10V to by nám digitální obvod mohlo zníčít, proto ochranný odpor. Pokud není vstupem nějaké obyčejné hradlo, ale AD převodník mikrokontoléru - máme problém, protože AD převodník vyžaduje nízký vstupní odpor kolem 1K. Pokud to chceme udělat úplně dokonale - modifikujeme zapojení jako na obrázku dole - záporná zpětná vazba nám zajistí (téměř) nulový výstupní odpor OZ, ale ochranný odpor R4 nám omezí proud aby se nezničily ochranné diody, které má mikrokontrolér úplně stejně jako každý jiný CMOS čip.
Varování na závěr - dotkli jsme se něčeho , čemu se říká ochrana proti ESD (electrostatic discharge) - to je dnes "
buzzword". Tisíce velemoudrých osob, které už 30 let (nebo nikdy) nepostavily ani blikátko tohle sáhodlouze za velké prachy řeší. Proto opět varuju předem - podle mých zkušeností vám vstupy do MCU s těmito ochranami vydrží, ale jesti uděláte zkoušku na VUT, nebo vás vezmou do práce v oblasti "
ochrany proti ESD" nemohu zaručit, neb jsem jenom vidlák, bez "
kvalifikace v oboru".
Ještě dnešní rada brunetám. Pokud - poučena minulými díly seriálu - vstupíte v latexových kozačkách, blonďaté paruce a hedvábném negližé do robotické pracovny svého miláčka a budete falešnou hřívou eroticky pohazovat - třením "vlasů" o negližé vznikne statická elektřina, která se přes latex na kozačkách nevybije do země a jiskra jistě přeskočí... Jenom se pak nedivte když místo "vzlyků touhy" uslyšíte něco jako - "krávo - zničila jsi mi procesor za 300,-" - Prostě bavlněné triko, hygienické bombarďáky a kovová sponka v hlavě - je jistota. Statickou elektřinu raději vybijte sáhnutím na topení nebo vodovod, pak možná nastane opravdové erotické dusno - což neznamená že zmíněný divoký outfit vám nemá viset ve skříní jen tak "pro případ potřeby" .....
16. září 2012 v 5:36 | Petr
Říká se, že opatrného muže poznáte podle toho že má kšandy i pásek zároveň. No nejsem si jistý, že blondýny vědí co to jsou
kšandy, takže rychle k elektru.
Někdy prostě nemůžete použít nepřepólovatelný konektor, nebo musí ochrana proti přepĺování být tak dokonalá, že krom mechanické potřebujete i elektronickou ochranu.
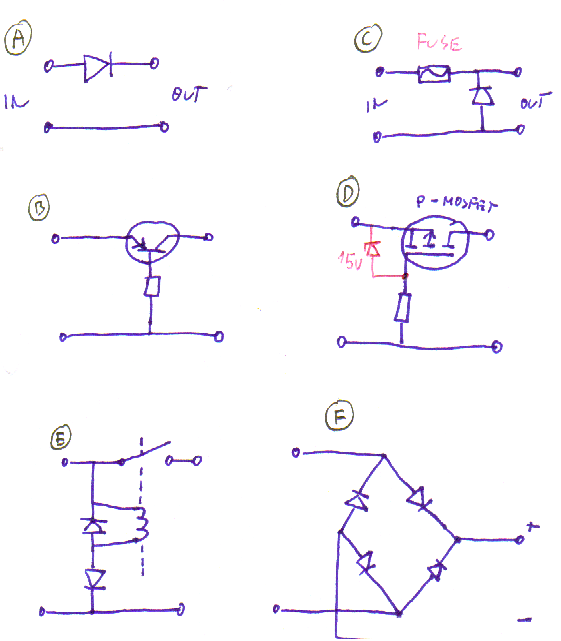
Omlouvám se za ručně kreslenou malůvku. Probereme vše důkladně.
A - je úplně nejjednodušší ochrana proti přepólování - dioda v napájení, často ve spojení s velkým kondenzátorem za ní může mít zároveň funkci "
Kubáčovy magické diody" která brání resetování procesoru při velkých proudových odběrech. Problém tohoto zapojení je v úbytku napětí na diodě, které u klasických diod činí 0,7V a u Schottkyho kolem 0,4V takže pokud potřebujete diodou prohnat proud 10A klasická dioda "
protopí" 10 * 0,7 = 7 Wattů a to je hodně.
Proto zejména výrobci radiostanic si zvykli používat destruktivní paralelní ochanu dle obr.B. Při správném pólování se neděje nic při přepólování se dioda otevře a pojistka shoří. Tolik teorie, problémem je praxe - pojistka musí být dimenzována na proud, který je o něco větší než je maximální proudová spotřeba obvodu. Tudíž i dioda by měla být dimenzována na ještě větší proud než pojistka - což vede k diodám na 5-20A - obrovským. Takže v praxi se na to výrobci vysílaček (a i robotici) často vykašlou a dají tam nějakou normální diodu a počítají s tím, že při přepólování prostě shoří i ona. Přitom doufají že shoří ve zkratovaném stavu, protže jestli shoří v rozpojeném stavu tak je "její oběť" zbytečná a obvod stejně dostane ránu.
Zdá se, že nevýhody převažují, ale světe div se - sám tento způsob ochrany používám zejména u MOSFETových můstku řidicich motory - pojistku v nich najdete, ale diodu byste hledali marně, přesto tam je - jsou to "substrátové diody" MOSFETů, nebo ochranné diody u bipolárnícm můstků, které tam stejně musí být k potlašení napěťových špiček na indukčnosti motoru.
Z praktického hlediska se snažím vyhnout trubičkovým pojistkám, které při přepólování "jenom shoří" a raději používám Polyswitche - vratné tepelné pojistky, často i v kombinaci s "magickou diodou" která chrání procesor a s malinkatou ochrannou diodou, která chrání ostatní elektroniku.
Kupodivu ani pojistka nemá nulový odpor - hlavně pokud je to pojistka v držáku a navíc musí mít i odpor na kterém vznikne teplo, které ji nakonec přepálí. A ještě navíc tahle ochrana je opravdu někdy destruktivní v tom smyslu, že proudy prři přepólování jsou obrovské a třeba přehoří i spoje na desce - takže pro dokonalou blbuvzdornost je vhodné zapojení dle schemátka B. Při přepólování se tranzistor ani neotevře žádné obrovské proudy nikam netečou, nic nehoří. Zdánlivá idylka, která má dva problémy.
1. Pro dokonalé vybuzení by proud do báze tranzistoru měl být kolem 10% proudu kolektorem - už při 1A je 100mA relativně hodně.
Proto máme téměř ideální zapojení D - tím že tranzitor PNP vyměníme za P-MOSFET zmizí nám problémy s budícím proudem do báze. Navíc tenhle MOSFET je celou dobu zapnutý, takže si nemusíme dělat starosti s kapacitou hradla a vybrat typ pro obrovské proudy 100A a výše, jeho odpor v zapnutém stavu je nepatrný (někdy menší než odpor plošného spoje). Opět idylka, akorát u napětí kolem nad 5V a více nesmíme zapomenout na ochrannou zenerovu diodu (červeně), která zajístí aby napětí GATE-SOURCE nestouplo nad výrobcem doporučenou mez (obvykle 5-20V - viz datasheet) podle typu MOSFETu.
Druhý problém je substrátová dioda MOSFETU - při návrhu zapojení musíme dát pozor abychom ji zapojili tak aby při přepólování nevedla. Takže když se podíváte na obrázek je vám jasné, že jsem nevědomky předvedl jak se to nemá dělat, protože při přepólování mého schématku vám proud projde i vypnutým MOSFETEM. Správně to má být zrcadlově obráceně - berte to tedy jakože tedy baterka je připojená na pravé svorky a zbytek obvodu na levé (opačně než ostatní schémátka). Promyslete to s tužkou a papírem pro obě polarity a uvidíte ....
Pro speciální případy (vysoká napětí, velké proudy, konzervativně ladění robotici) se stejné zapojení dá udělat i s relé - schémátko E. Jedna dioda propouští proud přes cívku relé jenom když je polarita baterky správná. Druhá dioda chrání před napěťovou špičkou na indukčnosti cívky relé když se baterka odpojí.
Poslení zmínka - celá řada jiných obvodů má chránicí funkcí "jen tak mimochodem" jako příklad jsem uvedl klasický čtyřdiodový Graetzův usměrňovač schémátko F - který usměrňuje střídavý proud a tudíž "logicky" umožňuje zapojení provozovat při obou polaritách stejnosměrného proudu.
Úplní paranoici si mohou do obvodu zapojit i indikaci přepólování. D1 je červená LED - svítí když je přepólováno D2 je zelená led svítí když je všechno v pořádku. Pokud se vám zelená kontrolka nehodí dejte tam obyčejnou nesvítivou diodu, ale D2 nevynechávejte protože svítivé diody v závěrném směru více než 5 voltů nevydrží.
Ještě oblibená rada pro brunety - baťoch a pohory jsou pro jisté muže více sexy než latexový obleček a bič -tak využijte toho že jste bruneta a hrr. s chlapem na hory. Jenom si dejte pozor aby na vás nebylo vidět, že baťoch nesete poprvé v životě.
9. září 2012 v 5:38 | Petr
Celý minulý měsíc jsme probírali otázku blbuvzdornost robotů a pojmy jako filtrace napájení a ochrana proti přepóliování tam jenom pršely.
Filtraci napájení jsem už kdysi dávno probral, takže zbývá už jenom ochrana proti přepólování.
školním pohledem vzato můžeme ochranu proti přepólování třídit na Aktivní, pasivní, sériovou, paralelní, destruktivní, nedestruktivní a kdoví jak ještě, ale to všecho je moc složité, tak to rozdělíme na dvě kapitolky
- Mechanická ochrana alias - Nepřepólovatlené konektory
- Elektronická ochrana alias obvody, které prežijí přepólování.
Dnes jsou tedy na programu konektory.
Nejjednodušší obranou proti přepóliovaní konektrou je samozřejmě taková konstrukce konektoru, které mechanicky vylučuje zasunout jej špatně. Tomu vyhovují známé (a hnusné) konektrory z fastonů pro auta a celá řada dalších konentorů je udělána tak, že nejde "zasunout opačně"

DO důsledku dovedená blbuvzdornost dokonce vyžaduje, aby pro každý účel byl použít jiný konektor - tedy napájení jiný konektor, vnitřní sběrnice jiný konektor, každé čidlo svůj typ konektoru atd.
Tento požadavek je krásný a určitě snižuje zmetkovitost na lince, kde negramotní indové montují Hi-Fi věže SONY, ale pro robotiky je nepraktický, jednak protože by se mohlo stát, že budete hledat 20 typ exotického konektoru, který jste ještě nepoužíli a navíc robot není nikdy hotov. Vždy je to rozestavěné staveniště, na které se "až bude čas" pověsí další moduly.
Proto robotici s oblibou používají konektory do jisté míry univerzální - většinou typu "pinová lišta" - tedy řádka pinů která se zapáji do desky a později se k ní vyrobí náležitý "protikus" Vlastnotí konektorů typu pinová lišta je symetrie podle osy - takže nic nebrání zapojit konektor opačně. Přesto i takové konektry se dají udělat "Blbuvzdorně" a to tak že při opačném zapojení sice daný modul nefunguje, ale alespoň neshoří.
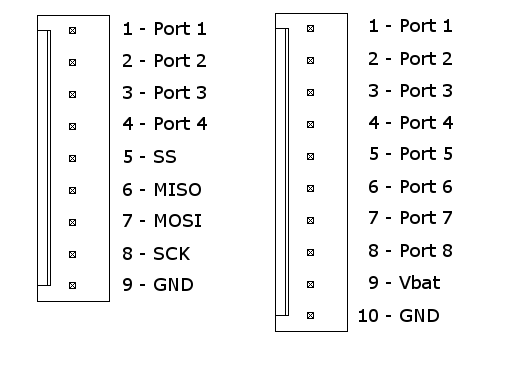
Jak se to dělá bych ukázal na nejjdenodušším konektoru v robotech - konektoru pro servo
Jenom pro představu si vezmeme špatné zapojení , které v případě servo-konektoru by vypadalo takto : Zem na jenom krajním pinu, napájení na druhém krajním pinu a signál uprostřed - při otočení takového konektoru se zem zkratuje na napájení a naopak a je konec ...
Proto mají serva konektory signálový pin na kraji - pokud zapojíme konektor obráceně - střední pin vždy zůstane zapojený správně a jediné co se staně je že se nám na vstup serva připojí (podle druhu konektoru) buď napájen, nebo zem což ochrané obvody vstupu serva musí vydržet.
Na střední pin, který je v obu polohách zapojen správně je lepší zapojit zem, pro případ že by vaše elektronika byla přes kostru robota spojená se zemí ještě někde jinde, takže Airtronics má lepší konektory pro serva než Futaba, ale to je jenom detail.
Jinými slovy- už v okamžiku návrhu rozložení pinů v konektoru musíte počítat se zapojením "obráceně". U konektoru s lichým počtem pinů prostřední pin je vždy zapojen správně, proto je vhodné na něj dát zem a zrcadlově obráceně proti napájení je vhodné dát buď nezapojený pin, nebo nějaký vstup, s ochranným odporem, který snese plné napájecí napětí.
Příklady, které by ani při přepólování neshořely vidíte na obrázku, vlevo sice není na středním pinu zem, ale to by nemuselo tak vadít.
Nicméně jako univerzální radu bych dnes dal - nenechávejte rozložení pinů na náhodě, a vždy si na kus paíru nakreslete rozložení pinů na zásuvce i zástrčce, vystřihněte nůžkami s "virtuálně" zkuste zapojit obráceně "co by se stalo". Jako vždy v otázkách blbuvzdornosti - 5 minut navíc ušetří mnoho hodin "blbé nálady" nad spáleným robotem.
Dnešní rada pro brunety zní - pokud je robotik zaujatý robotem - striptýz ve dveřích robotické pracovny jej sice vytočí do vysokých otáček, ale často ne v tom správném směru. Neberte to jako své selhání, pokud se vám jedná především o sex - svalovců bez mozku je přece všude plno ....