Roboti
16. června 2015 v 5:17 | Petr
Nechci se pasovat do role "
mediální hvězdy" - ale lidí, kteří mi na
Robotickém dni skákali do cesty, jakože čtou tento blog - bylo více než loni a více než jsem si představoval, že jich bude. Tedy cítím nevyslovenou avšak jasnou otázku - co bude Kubáč psát o robotickém dni ?
Tedy nejprve chvála - dvoudenní průběh robotického dne odstranil shon sobotního závodu - takže ani obézní botec s platfusem (já) nebyl na konci dne naprosto vyplivnutý - jak bylo běžné v minulých letech. Na druhé straně - sobota odpoledne byla jaksi smutná a prázdná a též někteří soutěžící si stěžovali, že dvoudenní Robotický den se nedá zvládnout metodou "do Prahy na otočku". Výsledkem je, že se neodvažuju radit a počkám až organizátoři v hodince tiché kontemplace celou věc zhodnotí.
Díky dvoudenímu průběhu jsem konečně po létech viděl i ty disciplíny, kde jsem nedělal rozhodčího - a musím konstatovat, že úroveň robotů je už léta konstantní - což bych nebral jako chybu hobby-robotické techniky a komunity, ale jako jasný důkaz, že lidský faktor, hlavně tedy čas a odhad vlastních možností ( honostně označované jako "řízení projektů" ) je hlavním limitujícím faktorem. Přesto velmi častá nedotaženost robotů - nekalila soutěžícím aní mně den - a nadšení a vzdělání některých "hochů sotva dvanáctiletých" bylo až zarážející a silně nakažlivé....
To že úroveň robotů se mi zdá konstantní - nechť organizátoři berou jako pochvalu, protože tím není řečeno, že se jedná o stagnaci, nedej - bože jimi způsobenou, ale naopak "Robotický den" se stal institucí, službou veřejnosti - dlouhodobě zavedenou a fungující.
Na druhou stranu je třeba i trochu hanět - rozevírající se nůžky mezi možnostmi techniky a možnostmi lidí držících tuto techniku v ruce - jsou stále viditelnější a pro mně byly některé příklady až bijící do očí. Takže budíž chvála nesmírná firmám jako
Postav Robota, nebo
Hobbyrobot, které nabízejí své i čínské výrobky, do rukou české robotické veřejnosti a tím odstraňují ten problém, že klučina ve 13 ( nebo paranoik ve 43 ) může mít problémy s "
obchodováním s procesory na DealeXtreme".
Ale přesto si nelze nevšimnout - zejména v prezentacích firem - záchvaty neplodné ajfounovitosti - k čemu je lampa ve tvaru "kouzelné hůlky" z Minecraftu ? "Geekovství" sahající až za hranice zdravého rozumu. Urputné ulpívání na technologických / terminologických nepodstatnostech ( v jakých jednotkách se měří náboj kondenzátoru ? ) a to vše korunovné neblahým inženýrským syndromem - "co se v mládí na ČVUT naučíš .... ti až do smrti bude stačit" - neboli vystavovat v roce 2015 jako "moderní řešení" board z roku 2001 postavený na MCU verzi Motoroly 68000 ? Každý ať si to rozebere sám....
Robotici to patrně nebudou slyšet rádi, ale ti, kteří měli talent a krom toho i rozhled širší než k sub-atomárnímu řešení jediného ne-problému - už mezi námi nejsou - neb za nehorázně vysoké platy tlačí vývoj megakorporací vpřed. Ostatní ( mně v to počítaje ), kteří tak dobří nejsou s námi zůstali, a pokud mají ambici se elektrem živit - měli by se vážně zamyslet zejména nad širším okolím často velmi úzkého středobodu svých zájmů.
Robotický den 2015 je tedy za námi - těším se na příští rok, a doufám, že se "
nám dědkům" poraří udělat si ze sebe legraci v "
dědkovské rally"
soutěže Robocarts, na které jsme se na místě dohodli.
14. května 2015 v 5:32 | Petr
Robotický den se nám zase blíží. Když jsem vyplňoval formuláře pro organizátory (opět mě tam uvidíte) vzpoměl jsem si, že jsem dlouho nepsal nic o robotech - a taky jsem v robotice dlouho nic neudělal, pokud nepočítám robota řízeného televizním dálkovým ovladačem, kterým jsem přiváděl k šílenství našeho psa - tak dlouho až se psisko naštvalo a podniklo na robota lov - takže teď stojí na polici a čeká až budu mít čas znovu vyrobit praskou desku se senzory.
Nicméně při vyplňování formulářů jsem si vzpoměl na soutěž
Robotour asi tak před 3 lety kdy jsem slyšel tuto historku : "
upadl nám drátek k napájení motorů, robot mrtvolně stál, pak jsme drátek přidělali a robot vyrazil vpřed nejvyšší rychlostí a málem přejel rodinku s děckem v kočáře"....
Takže jsem robotikům - kteří mimochodem byli velice zkušení marfyzáci - jako amatér - začal okamžitě doporučovat
ANTI - WIND - UP proceduru, která - pokud by ji měli - změnila by zběsilý útěk před rozlíceným robotem jenom na relativně neškodné škubnutí (robota). Jelikož mnozí moji čtenářové teď přemýšlejí nad softwarem pro robotický den - pojďmě srozumitelně probrat
Anti WIND-UP nechanismus, abyste si jej mohli do robotu naprogramovat.
Nejprve tedy k čemu došlo u kolegů: Robot jak víte má software, který plánuje trasu - plánování má různé levely - od orientace v mapě okolí po propočet trasy až k určení jak rychle se bude které kolečko otáčet. Představte si, že plánování trasy určí že se pojede relativně neškodnou rychlostí 0,5 metrů / sec vpřed. Jenomže dráty od baterie k motorům upadnou. Takže procesor dostává informaci "kolik se skutečně ujelo" a podle toho nepatrně koritguje další postup :
První sekunda - požadovaná rychlost 0,5 metrů - ujetá vzdálenost 0 - chyba 0,5 metrů
Druhá sekunda - požadovaná rychlost 0,75 metrů - ujetá vzdálenost 0 - chyba 1 metr.
Pak robotici znervózní a začnou se 5 minut dohadovat "co se děje" - mezitím plánovač trasy dospěje do stavu ve stylu :
299 sekunda - požadovaná ryclost 99.9 metrů - ujetá vzdálenost 0 - chyba 149,5 metrů.....
Pak na to někdo přijde a upadlé dráty připojí - procesor ví, že je oproti plánu o 150 metrů pozadu - tak vyrazí maxímální rychlostí aby zpoždění dohonil a přejede maminu i s kočárem.
Takhle to je pokud se plánuje na "
vysoké úrovni". V robotech to je ale většinou mnohem jednodušší ( avšak se stejnými výsledky ). Rychlost koleček hlídá
PID algoritmus - tedy
Proporcionálně Integračně Derivační regulátor, o kterém jsme už psali
zde a
zde. Vykradu sám sebe a uvedu odstaveček z prvního článku - jak zhruba funguje regulace otáček (rychlosti) PID algoritmem. Tedy softwaru robota se pravidelně 20 - 100x za vteřinu spouští následující prográmek :
- Chyba_rychlosti = Nastavená - současná rychlost
- Suma_chyb = Chyba_rychlosti + Suma_chyb
- Rozdíl_rychlosti = Současná - minulá rychost
Proud_do_motoru = P * Chyba_rychlosti + I * Suma_chyb + D * Rozdíl_rychlosti
P, I a D - jsou Proporcionální, Integrační a Derivační koeficienty regulace.
Minule jsme brali že "plánovač trasy" eviduje chybu rychlosti - tady se chyba rychlosti akumuluje v proměnné "Suma _chyb" - pokud motory nejednou několik minut - tato proměnná dosáhne obrovské hodnoty - a robot pak prudce vyrazí "aby chybu umořil".
Existuje dokonce i horší varianta - že "Suma_chyb" přeteče z kladných do záporných hodnot a po přidělání drátku - robot vyrazí přesně opačným směrem než by všíchni odčekávali ....
Ergo "dělejte to jako já" - pokud Proud_do_ motoru - dosáhne 100% maxima - prostě přestaňte k "Sumě_chyb" přičítat další chyby. V takovém případě naopak procesor ve kterém běží PID algoritmus by měl "poslat nahoru" chybové hlášení, že motor (motory) mají nějaký problém, protože motory mají být navrženy tak aby dlouhodobý průměr proudu, který jimi teče dosahoval 50% maximálního proudu zastaveného motoru (v takovém režimu má kartáčový elektromotor nejvyšší účinnost).
Pokud přece jenom jste "opatrní inženýři" nemusíte přestat SUMU_CHYB akutalizovat hned když poprvé dosáhne požadovaný proud motory 100% - můžete počkat pár cyklů - rozhodně však ne déle než 1 vteřinu - protoře pokud ani po nastavení 100% proudu se robot nerozjede rychlosti, kterou plánovač trasy požaduje - nemusíte být inženýr, aby bylo jasné, že někde je něco špatně a další přičítání k Sumě_chyb (tedy další zvětšování integračního členu) povede k úrazu člověka spíše, než k poklidné jízdě po naplánované trase....
Tedy čiste lingvisticky "Anti Wind up" - je nědo jako "procedura proti přetažení" - pokud ji máte, drátek vám upadne, a pak jej (po několika minutách) přiděláte zpátky - robot nemá v PID algoritmu nasčítáno "skoro nekonečno", ale jenom něco málo za pár cyklů PID regulace, než dosáhl požadavku na maximální proud - a to je právě ta hodnota, která naprosto stačí na kvalitní PID regulaci otáček, ale způsobí jen to (snad neškodné) škubnutí.
OK zbývá už jenom tradiční rada pro blondýny - k sehnání manžela na robotickém dni potřebujete - krátkou sukni vysoké podpatky a robota bez Anti Wind Up procedury - pak musíte celou situaci nahrát tak, že robot do vás drcne - vám se "
podlomí podpatky" a plácnete sebou tak "
nápadně nenápadně", že díky krátké sukní ukážete "
vybranému adeptovi" co vám příroda nadělila - a je ruka v rukávě. Podotýkám jenom, že robotici jsou lidi vzdělaní, slušní a často i bohatí - nebo alespoň s potenciálem být bohatí -
paní Zuckerbergová (nebo
paní Kubáčová) by mohly vyprávět....
17. února 2015 v 5:53 | Petr
Představte si rok 1916 - Angličani jsou zakopaní někde v Belgii - velitel velí - bodáky nasadit - na zteč - rota se zvedne - huráá - z druhé strany začnou štěkat kulomety - mrtví vojáčci popadají do zákopu a je zase půl dne "
na západní frontě klid", než se o stejnou - marnou - akci pokusí druhá strana.
Pak se objevil první tank -
Mark-1 - neforemná bedna z tlustého plechu, která se rychlostí unaveného chodce vleče vpřed. Směšná zbraň - až na to, že ať do ní pálíte z kulometu jak chcete - nic se neděje. Takže vývoj šel dál a bylo třeba tanky nějak likvidovat - což nakonec vedlo k "
Panzerfaustu" a
RPG7 - což jsou králové protitankových zbraní. Existují sice modernější elektronické "
hračky" jako je "
Javelin", ale jedině Panzerfaust vyhnal tanky z měst a RPG7 způsobila, že proti zbraní za pár set dolarů potřebujete keramické, kompozitní aktivní a já nevím jaké pancíře za milióny dolarů.
Dneska nemáme problém s tanky, ale máme problém s "
drony". Tedy nejprve - co to je takový dron - rozhodně to není
RC kvadrokoptéra s kamerou - z jejíž "
regulace" - potažmo zákazu - pro nejasné definovaná "
bezpečnostní rizika" mají orgasmus státní úřednící po celé zeměkouli.
Dron to je
MQ1-Predator a jeho následovníci. Letadlo s extrémně dlouhými a tenkými křídly - kvůli vysoké účinnosti - s vrtulovým pohonem - kvůli tichosti a malé spotřebě paliva - které řízeno - přes vojenské družice - z druhé strany světa - lítá nad Pákistánem a zabíjí lidi, o kterých si operátor myslí, že to jsou islamisti.

Proč je třeba přemýšlet nad technologií sestřelování takových dronů ? Jak by se vám líbilo, kdyby nad našimi hlavami lítaly Pákistánské drony a zabíjely lidi, které Pákistán považuje za "
nežádoucí". Abych nenasazoval Pákistánu psí hlavu - což takhle drony "
Islámského státu". Nebo nejmírnější varianta : Líbily by se vám Ruské nebo Americké - ozbrojené - drony nad našimi městy ? Pozoruhodné je, že střílení z dronu na lidi - má nezanedbatelný aspekt "
počítačové hry". Kožené křeslo, dva joysticky, 4 LCD monitory, blikající barevná taktická mapa.... Americká armáda dokonce přiznává, že
počítačoví hráči jsou lepší operátoři dronů než skuteční piloti. V suchu a teple na jednom monitoru střílite údajné islamisty a na druhém sledujete vzkazy "
přátel" na Facebooku - klídek pohoda - kávička voní..... Takový klídek, až se vnucuje vzpomínka na
zákaz kuše papežem Inocencem II v roce 1139 - jakožto "
zbraně zbabělců", kterou "
neurozený sedlák, bez výcviku může ze zálohy zabít rytíře - šlechtice, který cvičil v boji celý život".
Vtip takového dronu je v tom, že je to svým způsobem "antistíhačka" - laminátové letadlo - bez horkých plynů z trysek - tedy neviditelné pro infrakamery - téměř "průhledné" pro radar - prakticky neviditelné okem a obtížně slyšitelné na vzdálenost, na kterou je schopno zaútočit. Je tedy zjevné, že všechny současné protiletecké zbraně jsou zaměřeny na trochu jíné letadlo a dron je prakticky stejně nesestřelitelný jako Mark-1 v roce 1916, nebo možná ještě "více nesestřelitelný", kvůli nenápadnému letu velmi daleko od osoby, na kterou míří. Čím takový dron zlikvidovat ? Nevím, ale uklidnilo by mě velice, kdyby to už ( naše ) armáda měla ve skladu.
Moje paranoia jde dále - po úspechu dronů ve vzduchu - nepochybně se objeví "
Terminátoři" - jakožto chodící ( jezdící ) ozbrojení roboti pálící na "
vhodné cíle". Na ty sice RPG7 patrně bude fungovat - ale fenomen, že některé armády budou "
statečnější než lev a tygr dohromady , neb budou zabíjet klikáním na monitoru z teplíčka kanceláře" - tam jistě bude také.
Takže pokud nemáte ráno, při tlačení na záchodě co dělat - přemýšlejte nad technologií, jak sestřelovat drony, a pokud dostanete "neodolatelnou nabidku" práce na novém "bezpilotním prostředku" - přemýšlejte velmi dlouze jestli stojí za to, aby za pár let, vaši potomci, byli ohrožování produktem vaší dnešní chamtivosti.....
14. prosince 2014 v 6:15 | Petr
Jasně, že už blábolím z podzimní temnoty, ale v rámci mé psychotické ideje, že "
všechno tak nějak souvisí se vším" jsem nedávno přemýšlel nad "
vývojem a laděním elektroniky". Při té příležitosti jsem si uvědomil jisté souvislosti s armádou. Vojsko má na všechno svéráznou hantýrku. Už ve Švejkovi se dočtete "
zadrženej lénunk měl mně být vyplacen od regimentu, a ne od kumpačky,poněvadž jsem byl vedenej jako regimentsarestant". Zase když jsem já byl na vojně tak stále ještě platil
Všeob-P-41 (práv.) a tak dále.
Takže "péči o pacienty" se u vojska říká "léčebně odsunový systém". Takže zuří bitva a vojáček je zraněn. - Po prvotním ošetření přímo pod palbou, které většinou spočívá v zaškrcení tepenných krvácení (protože z nich se dá umřít za desítky sekund) a odnesení na obvaziště. Tam teprve pochopíte co "léčebně-odsunový" znamená. Tedy zranění vojáčci se třídí na tři supiny - Tak těžce zranění, že se nechají pod vysokou dávkou analgetik (morfin je velmi laciný) umřít přímo někde u obvaziště. Tak lehce zranění, že se nechají čekat až je čas je obvázat a poslat zpátky do BVP (Panduru).
A pak existuje třetí skupina - ty které je třeba "zajistit" - aby neumřeli během transportu a rychle dopravit na nadřízené obvaziště - které více připomíná zdravotnictví a méně jatka. I na nadřízeném obvaziští funguje třídění a i z něho vede cesta do týla pro "středně zraněné" - na obvaziště, které ještě více připominá špitál atd ....
Takže co mladý robotik může z předchozích blábolů vytěžit. Pokud stavíte nějakou elektroniku - a je to něco částečně nového - jsou celkem 3 možnosti.
- Funguje to skvěle
- Funguje to částečně
- Nefunguje to vůbec a nikdy to fungovat nebude.
Takže mladý robotik se bojí varianty 3. Já osobně vím, že "čas je dražší nežli peníze" proto se bojím varianty 2. Představte si, že rozborem, proč obvod selhal zjistíte, že jste udělali nějakou opravdu zásadní botu - kterou nelze jen tak napravit - to vlastně neni katastrofa - otevřete odpadkový koš - šup - a jste zase svobodní lidi k vymýšlení něčeho jiného.
Horor je možnost č. 2 - tedy obvod "něco dělá" ale tak úplně nefunguje - v tom případě jej musíte "přesunout na vyšší obvaziště" - tedy je třeba zásadního rozhodnutí - jestli jej budete zlepšovat - nebo jestli se budete snažit prokázat, že "tudy cesta nevede". Obě varianty totiž mohou být na dlouhé lokte.
Bohužel emocionální zaujetí při konstrukci nás často nutí "rozchodit to za každou cenu". Není špatné být tvrdošíjný a zkusit dohnat "věci do krajnosti". Předem bych jenom varoval před opravami "chyb, které nejsou tam kde si myslíme".
- kousne se vám občas procesor - tak přidáme druhý, který bude ten první hlídat...
- signál z čidla je utopený v šumu - přidáme zesilovač abychom (šum) zesílili....
- shoří nám tranzistor, když se kolečko zasekne - vymyslet algoritmus, který hlídá kdy se kolečko zaselo je složité - daleko jednodušší je dát tam tranzistor "jako bejk" ať se radši ukroutí hřídel...
A tak dále.... V každém případě když něco opravdu nefunguje - zamyslete se jestli budete raději hledat "jak to přinutit fungovat" nebo bádat "jestli to vůbec může fungovat". Hlavně tedy nedělejte tu chybu, že budete stodolu podpírat hráběmi, aby nespadla a hledat "workaround" - to se nakonec vždy vymstí - jenom později, když jsme do slepé cesty investovali daleko více času a peněz.
7. prosince 2014 v 6:06 | Petr
Osobní historii výroby svých robotů už jsem tady probíral několikrát, ale máme podzimně - zimní temno - období kdy lidi podléhají alkoholismu nebo bilančním sebevraždám, proto i já se potřebuju uklidnit, že zatím "nic není ztraceno" ačkoliv pravděpodobně je.
Kdekoliv si čtete nějaký návod na robota - získáte pocit, že to je maximálně na jeden víkend - v pátek cestou z práce koupíte součástky a v neděli odpoledne je hotovo - mezitím ještě stačíte natočit na YouTube video, které působí dojmem, že celá stavba trvala 4 minuty a 39 vteřin.
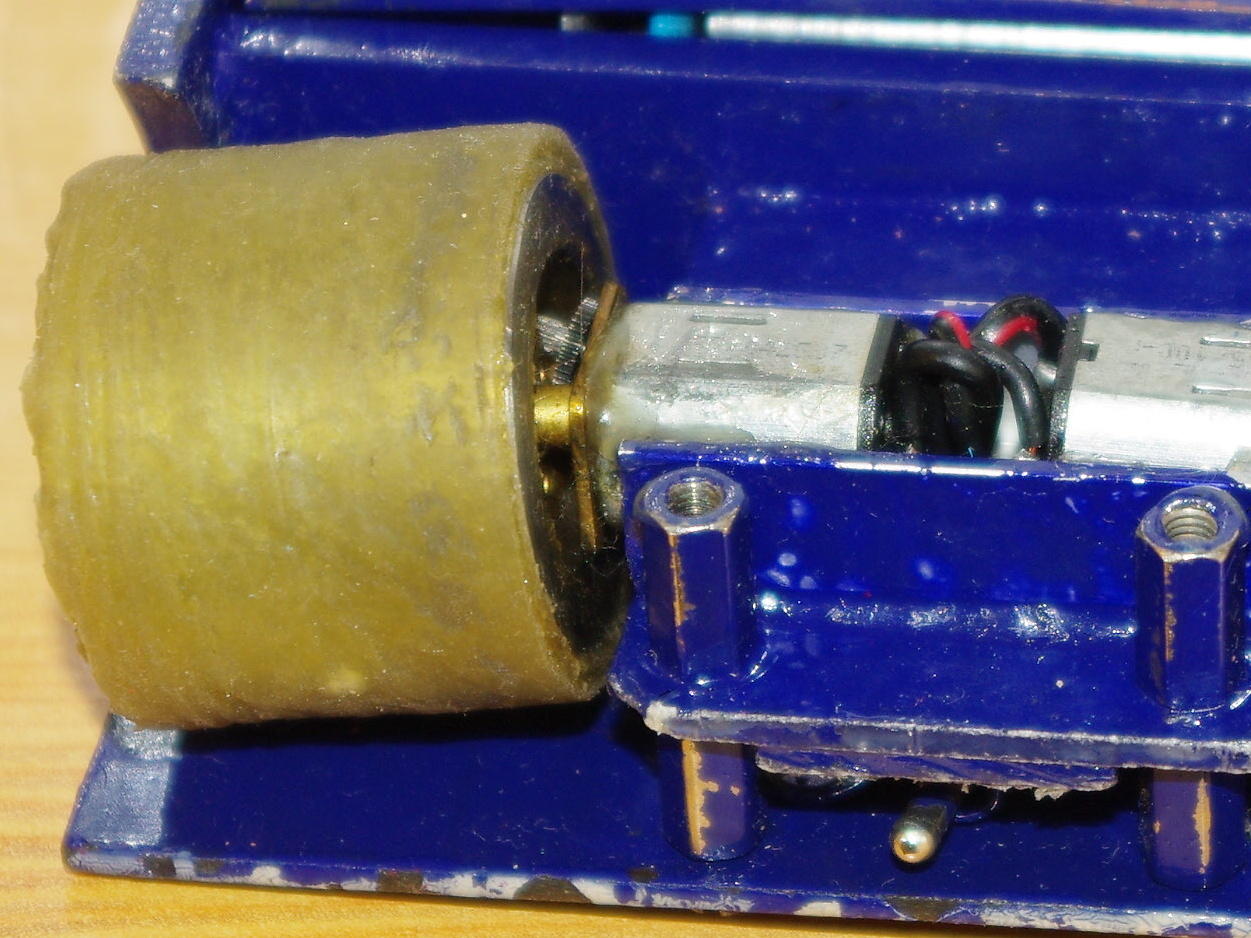
Přesně pod vlivem takových informací jsem se v roce 2009 "naštval" a řekl jsem si "postavím robota za víkend" a kupodivu jsem "téměř uspěl", protože většího z robotů, které vidíte na
obrázku jsem, včetně driveru pro krokové motory stavěl jenom čtvrt roku. Měla to být robot na
soutěž Robotour, jenomže mezitím mi pravidla Robotour "
tak nějak utekla" v tom smyslu, že se v této soutěži se stalo povinným vození 5l soudku piva - tím se robot již tak těžký díky použití krokových motorů - dostal do pozice hardwarového monstra, které by vahou sudu ztrácelo kroky krokáčů a tím i orientaci v terénu. Dodnes ale stojí v pokoji jako "
budoucí platforma" pro testování čidel ;-))).
Takže od podzimu 2009 do podzimu 2014 uplynulo 5 let, kdy jsem 2x změnil zaměstnání 1x bydliště, byl sbalen paní Kubáčovou a (částečně dobrovolně) oženěn, atd.... Bohatý program i pokud byste roboty nestavěli nicméně na "velkého robota" se práší a nic....
Proto je na čase uklidnit sám sebe "že to tak má být" takže si dovolím opět ukázat galerii a probrat jak dlouho to trvalo "z ničeho" postavit prvního robota, za kterého se dodnes nemusím stydět.
Výčet "klíčových událostí" :
- Duben 1998 - pustili mě z vojny
- Květen 1998 - nastoupil jsem do práce
- Podzim 1999 - zavedli nám do práce Internet
- Jaro 2000 - četl jsem o prvních robotech a rozhodl se postavit si vlastního
- Podzim 2000 - zuřivě pátrám z čeho takového robota postavit a jak vůbec dát dohromady převodovku
- Prázdniny 2001 - z grilovacích motorků dávám dohromady věc na obrázku
- Jaro 2002 - objevil jsem náhradní převodovky do modelářských serv a kreslím z nich pohon pro skutečného robota.
- Prázdniny 2003 z převodovek do modelářského serva stavím podvozek prvního robota.
- Podzim 2003 exmanželka odchází za hlasem svého srdce ( nebo jiného orgánu ? ) i s 18 měsíční dcerou.
- Duben 2004 - na prvním veřejném robotickém dni se budoucí robot prezentuje jako nehotový kus hardwaru a véééliké ručně malované schéma budoucí elektroniky, které si všichni fotí
Takže jak dlouho ? Od jara 2002 kdy jsem koupil ozubená kolečka do převodovek do jara 2005 - tři roky - sakra už jsem pomalejší než na samém začátku.
To jsem se tedy moc neuklidnil. Otázka však je, proč jsem tak pomalej ? Rád bych sám na tuto otázku našel odpověď, ale problém bude asi v tom, že jednak "mě nic nehoní" a na druhé straně jsem rád když konstrukce jistým způsobem "dává smysl" - jsem rád když cizí člověk za 3 minuty nemá jasno v tom, proč by polovinu komponent - bez újmy na funkci - vyhodil, což často bývá u robotů typu "Arduino přilepené izolepou na komerčně koupeném podvozku".
Díky tomu se moje konstrukce robotů skládá z dlouhého rozmýšlení "jak věci udělat" pak z krátkých erupcí zuřivého stavění - a pak z dlouhého období zuřivého přemýšlení zdali "nepovedený hybrid rovnou vyhodit, nebo zkusit ještě předělat".
Nesuďte mě přísně - nebo mě rovnou zastřelte - někdy (nyní) jsem na sebe tak nasranej, že jen zbabělost mě drží to neudělat sám ;-)))
24. srpna 2014 v 6:15 | Petr
Kdysi jsem ostře protestoval proti robotům, kteří si "na zádech nesou laptop" a tvrdil jsem AVR zmákne všechno. Pak jsem zabrousil mezi 2D sonary a složitá čidla a můj názor se najednou změnil na "je třeba na palubu dostat co největší výpočetní výkon" a zároveň jsem vždy tvrdil "serverovou farmu do robota ne". To zánlivě směřuje k nějaké schisofrenii, ale spíše to berte tak že s roboty je ta potíž - stejná jakou řeší matička příroda se zvířátky - že totiž na palubě by opravdu mělo být "co nejvíce výpočetního výkonu" ale zase jenom tolik aby robot své počítače unesl a (bateriem) uživil.
Takže jsem své roboty dlouho - a vlastně dodnes stavěl kolem procesorů Atmel AVR a jako správný vidlák, který vše staví kolem vidlí, tak de facto ATMega8 mi stačila dodnes a když jsem potřeboval "opravdu rychlý procesor" tak jsem použil ATmega88, která má povolen takt až do 20MHz.
Kolem těchto procesorů jsem si postavil, co dneska frikulíní označují jako "ekosystém" tedy mám své programátory své převodníky RS232 na ladění, své "blinkenlichen" - LEDky kterými roboti dávají najevo své vnitřní stavy atd.
Jenomže dneska mám ambice postavit svého (posledního ?) velkého robota - a tam už AVR nedává příliš smysl. Lépe řečeno v rámci odladitelnosti celého systému dávají AVR smysl jako inteligentní periferie nějakého centrálního počítače.
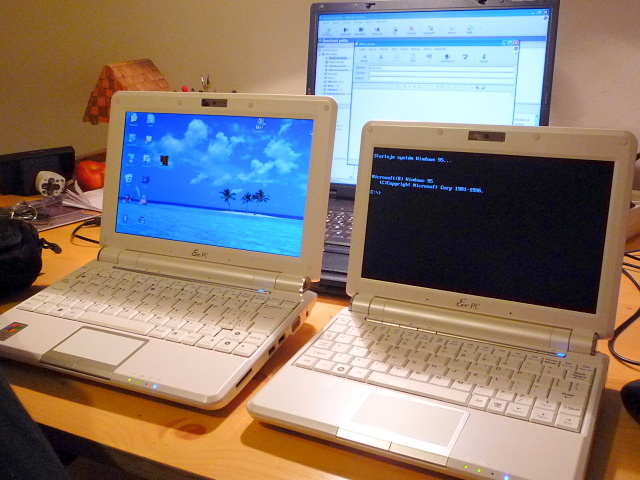
Tak jsem přešel na ideu "laptopu na hřbetě robota". A první, co jsem koupil byl v roce 2010 Asus EEE Pc 1000D - což je netbook, který má jako procesor nějaký podtaktovaný mobilní celeron na 900 MHz - sympatický počítač - žena jej dodnes používá na surfování po internetu.
Pak jsem se vyloženě zamiloval do EEE PC velikosti 9 palců - což svého času byl nejmenší netbook - a taky jsem od Kamila koupil Ausus EEPC 901 - dokonce s dotykovou deskou vhodnou k vestavění do displeje abych měl dotykový displej.
Nebudete tomu věřit, ale při stěhování s novou ženou do nového bytu jsem rozbil jedinou věc - zmíněný dotykový displej - takže malý Asus zůstal bez něj - a je nyní používán k surfování po internetu z postele a k experimentům s různými linuxy.
Vtíp je v tom, že laptop v robotu stále nedává moc smysl - a tak jsem uvažoval jak by "centrální počítač" měl vypadat :
- Patrně by měl být pod nějakým lightweight linuxem
- Patrně by měl mít dotykový displej k hrubému nastavování robota na soutěži "klikáním na veliká tlačítka"
- Patrně by měl mít základ pro komunikaci s AVR - tedy UART
- Měl by být "vidláku-vzdorný" a "vidláku-zvládnutelný"
Kdysi už tady takový "
Systém" byl a to
Friendly ARM - a dokonce i friendly ARM jsem měl možnost koupit pod rukou, ale nekoupil jsem - protože mi "
vidláku- zvládnutelnost" Friendly Armu zdály nedostatečná - zejména kvůli malé "
komunitě" užvatelů. Navíc tento systém v počátcích měl pouze 400 MHz ARM a WINDOWS CE !!!
A nakonec "
budiž Raspberry Pi" - ne že by tento "
systém" se mi zdál v něčem lepší než kterýkoliv jiný, ale komunina "
vidláků" kolem něj, z nichž někteří jsou na tom s počítači ještě hůře než já - je impresivní. Jenomže pořád to mělo nějakou chybku - a v tomto případě - ideu jak si autoři představují použití tohoto stroje - děcko šlohne otci monitor s HDMI vstupem, a máti zase USB klávesnici a bude se tvářit, že má "
plnohodnotný počítač s linuxem" ? To není příliš kompatibilní s ideou
"robotického mozku".
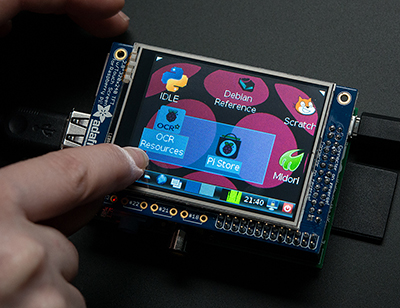
Naštěstí je tu
Adafruit a jejich
projekt /produkt - v nadpisu zmiňované -
PiTFT. Což je
"shield" který se nasadí na Raspberry Pi a odtud si vezme hardwarové SPI kterým datově živí malinkatý dotykový TFT displej 320x240 pixelů. Prostě "
friendly ARM" jen postavený z jiných komponent - vidlákum na míru.
Přestože jsem téměř 100% přesvědčen, že toto bude budoucí mozek mých robotů - přece jenom bude nutná nějaká drobná práce - minimálně si budu muset postavit "
mezi-shield" mezi displejem a Raspberry, kde bude "
power management" a nějaké oddělení/přizpůsobení UARTU. Asi budete namítat leccos, ale berte to tak, že jsem "
spíše na ty drátečky" a vrcholem mého počítačového řízení robotů doposud byla "
hlavíčka pentia 6" o které jsem tady taky psal.
Pro dnešek už zbývá jenom tradiční rada pro blondýny - budete se divit, ale s WIFI kartou stačí Raspberry Pi i na porno na internetu a dokonce jej zvládá až do rozlišení 1920x1080 pixelů...
31. července 2014 v 5:15 | Petr
Vřele dodporučuju občas na
YouTube shlédnou nějakou přednášku na kanále
Google Tech Talks. Zejména přednášky o "
comupter vision" - počítačovém vidění jsou velice impresivní a i na Internetu už začínáte vidět výsledky - na Facebooku nabo na Picasse označíte ksichtíky známých na svých fotkách jmény a u cizí fotky vám najednou Facebook naznačuje - není to Franta Vopička z vašich minulých fotek ? Takže iluze, že ode dneška za 2 roky budou počítače rozumět analyzovanému obrazu je dokonalá. Drobný problémeček je v tom, že nikdo se příliš nechlubí hardwarem, na kterém takové úlohy běhají. Obvykle je to nějaká sklepní serverová farma, která má velmi úsporných 30 MegaWattů příkonu.
Tedy na jedné straně si drbny z
Bílovce pamatují všechno a "
jedou" jenom na šlehačkovou rakvičku z cukrárny na náměstí a na druhé straně 30 MW severová farma, ale nebojte se nemám v úmyslu zase psát své oblíbené - že technologii matičky přírody zatím pořád jenom koukáme z dálky na záda. Problém je v tom, jak z této technologické pasti ven. A vůbec - je to skutečně technologická past ?
Tyto věci jsou poměrně úzce propojené s elektronickým byznysem, výzkumem v oblasti počítačového hardwaru a s tzv Moorovým zákonem. Ten už jsme X krát probírali - princip je v tom, že od 60 let platí, že konstruktérům čipů se každých 18 měsíců podaří na stejnou plochu křemíku natlačit 2x tolik tranzistorů. Z toho jistí optimisit odvozovali, že to vlastně znamená, že každých 18 měsíců stoupne výkon počítačů na dvojnásobek. A vskutku v dobách
Sinclairu ZX spectrum a
Amigy 500 to zcela jistě tak bylo, ale pak přišlo
Intel Pentium 4 a padla kosa na kámen - tato řada PC procesorů měla už dnes být "
single core" ale na frekvencích v desítkách a stovkách GHz. Jenomže fyzika je mrcha, takže proudové a tepelné požadavky těchto procesorů byly enormní . a tak se zjitilo, že jdeme do slepé uličky. Tudíž se objevily "
multi core" procesory a některé zejména od AMD bychom řekli až "
many core" - stejně ale v desktopu málokdo má více než 8 jádrový procesor.
Celé tohle zastavení "
rychlostní větve" Mooreova zákona - je tak trochu tajné, nebo spíše jako "
hlavní zprávu" TV nova to neuslyšíte - protože je třeba neustále udržovat "
hype", aby nadšení frikulníni nepřestali kupovat elektroniku - dnes už spíše tablety a smartphony - z pochopitelných důvodů. Tablety a smartphony se tváří jako výkřik nejmodernější techniky, ale z hlediska procesorového výkonu jsou na tom de-facto velice uboze. Protože nedovedeme nacpat více výkonu do PC tak marketing prohlásil PC za "
zastaralé", protože ale je třeba nabízet COOL obsah tak výpočetně složité úlohy rozdělíme na "
klient" - na tabletu a "
server" nekdě ve 30 megaWattové serverovně - což marktetingově pojmeme tak že lokální skladování a zpracovávání informací je "
out a ať žije Cloud".
Já osobně si na tyto trendy nestěžuju, protože díky nim i můj CORE 2 DUO notebook z roku 2007 je stále ještě schopen "zastat všecno". Tabletisti to neradi slyší, ale (zatím) strčí každý tablet do kapsy, přestože CORE 2 DUO už nedosahuje ani 10% výkonu dnešních špičkových PC procesorů.
Pak máme ale oblast, kde marketingovými kecy nic neokecáme - a to jsou roboti. Zmiňované "
drbny z Bílovce" co jedou na šlehačkovou rakvičku mají "
v hlavě" 100 miliard MIPS a latenci zpracování dat max 100 msec. Takže pokud se jim chcete přiblížit žádným "
cloudem" to nevyřešíte. Vyřešíte to jedině tak jako nětkterá auta na
Grand Challenge - to jest roboticky řízený offroad si veze serverovou farmu s sebou. Tím ale dáváme všem jasně najevo "
tato technologie zatím není vhodná pro praktické nasazení", protože jestli z "
tableto-smartphonového" marketingu něco vyplývá pak je to představa jak má vypadat "
prodatelná technologie".
Takže tím jsme se dostali opět k tomu, abych si mohl přihřívat svoji biologickou polívčičku - pokud chceme robotické aplikace postavené na současném (nedostatečném) procesorovém výkonu. Je dobré se podívat jak to dělá matička příroda, když má stejný problém. V principu - jelikož každé zvíře musí svůj mozek "unést i uživit" tak matička příroda má zkušenost s neustálým nedostatkem výpočetního výkonu.

A opět moje stálé téma "
stavějte perfektní čidla" - ta vystačí s menším množstvím datového procesingu. Jenomže co to jsou "
perfektní čidla"
64 paprskový Lidar Velodyne za milion korun, který používají robotická auta je takové čidlo ? Nevím a už jenom díky ceně asi ne, ale zkusím dát příklad z přírody - na obrázku vidíte hlavu vážky. Každý ví, že hmyz má "
složené oko" a školáci v přírodopise jsou poučováni, že hmyz složeným okem "
skoro nic nevidí" - jak je tedy možné, že vážka loví hmyz v letu, mouchy se nedají rukou chytit a vůbec - zdá se vám z praxe, že "
hmyz je skoro slepý" jak psali v učebnici ?
Takže mrkejte na obrázek - jsou tam tři šipky - povšimněte si že horní část "složeného oka" je jiná než spodní část (červená a zelená šipka) a pro úplně slepé jsem modrou šipkou označil ještě "druhou sadu" očí zcela jiné konstrukce.
Drobné vysvětlení - oči na horním pólu oka (červená šipka) mají svůj optický systém z krystalické pravidelně uspořádané tkáně a proto jsou citlivé na směr polarizace světla. Oči na dolním pólu složeného oka jsou z amorfního proteinu a proto nejsou citlivé na polarizaci světla. Poslení oko "jednoduché" označené červenou šipkou - není na hlavě samo - vážky mají na hlavě tři takovéto oči ve tvaru rovnostranného trojúhelníka tyto oči nevytvářejií obraz, ale reagují na vlnovou délku a intenzitu přicházejícího světla a díky trojúhleníkovému rozložení i na směr.
Princip je v tom, že vážkla má ve složeném oku asi 28 000 očí - což je ve hmyzí říši extrémně mnoho - každé je dokonale přizpůsobeno úloze - horní oči vidí polarizované světlo a fungují jako kompas sledující polarizaci světla oblohy. Oči jsou zaostřeny tak, že každé oko je zaostřeno na obvyklou vzdálenost, na kterou snímá obraz. Tvar celého složeného oka je takový, že obraz je ostřejší a detailnější ve směru letu a více "přehledný a neostrý" v ostatních směrech.
Výsledek je ten, že 28 000 pixelů, zcela přesně přinášejícíh informaci o tom, co je důlěžité a neobtěžujících mozek nepodstatnými detaily je dostatěčné množství pro lov jiného hmyzu, zatímco u našich robotů se 300k pixelů tedy 640 x 480 pixelů považuje za zoufale málo téměř na cokoliv. Vážka, kdyby lovila pomocí WEBkamery z Lídlu - možná by byla stejného názoru.
ERGO - čím lepší čidla postavíme - tím je pravděpodobnější, že i se současným (
navždy mizerným) výpočetním výkonem budeme schopni dosáhnout použitelných aplikací. To je "
opravdu dobrá rada" pro robotiky, kteří se pohybují mezi
"sonary z EBAY" a "
Arduinem", ale třeba to jednou dojde i někomu jinému, kdo může zadat výrobu čipů polovodičové fabrice. Ostatně výskyt čidel typu "
Microsof Kinect" nebo
3D myš od Leap Motion naznačují, že někdo si to už začíná uvědomovat, ale ta inspirace hmyzem zatím u inženýrů není.
Jenom takový závěr zahořklého dědka - roboti nejsou jenom software - pokud to má k něčemu vypadat - hodí se i fyzika, optika, elektronika, možná i chemie, smůla je, že než se těmito disciplínami prokoušete k použitelnému čidlu - je z vás dědek, a pravděpodobnost že výrobou fyzikálně-chemicko-elektronických čidel skončíte jako Hig-Tech miliardář (třeba
Elon Musk) je směšně malá (ale nenulová).
Zbývá už jenom tradiční rada pro blondýny - i blondýna se může vrhnout na složitý hardware - a při případných prezentacích výsledků jí divoké outfity mohou výrazně pomoci (nebo uškodit) ...
19. června 2014 v 5:32 | Petr
Když v listopadu 2003 moje tehdejší manželka prchla za anabolikovým bezmozkem z posilovny i s 1,5 letou dcerou - byl jsem tak nějak "
down", proto mě velice potěšilo, že lidi, kteří jsou dnes bez výjimky kámoši, uspořádali v
dubnu 2004 první "veřejný"
Robotický den.
Na robotickém dni byla spousta pozoruhodných robotů a taky spousta pozoruhodných jevů "
mezi nebem a zemí". Příklad - nějací kluci měli elektroniku pro robota v obalu od videokazety (ví mládež co to je ?) Když měli obal otevřený - robot fungoval jako z partesu, když obal zavřeli - robotovi se asi tak po 2 sekundách "
kousnul" jeden z procesorů a bylo vymalováno. Když jste se podívali dovnitř videokazety tak to bylo jako břicho mrtvého bezdomovce při pitvě - neskutečný chaos drátů na kterých visely jednotlivé "
čtyřdírkové moduly". Tak jsem se ptal - jakou sběrnici používají - a dostalo se mi odpovědi, že se jim jako nejsnazší jevilo použít I2C. Když jsem se ptal proč I2C tak jsem se dověděl, že to je sběrnice, na kterou se nejsnáze "
věší" další moduly.
Rozluštění pohádky jistě tušíte - když se dráty nacpaly do zavřeného obalu nastala "nežádoucí vazba" mezi nimi a bylo vymalováno. Protože sběrnice I2C je opravdu "svůdná" - nebo "ve své době" svůdná byla, protože zdánlivě řeší vše - adresování modulů, konflikty na sběrnici atd. Proto jsem vydal "Kubáčovo imperativní nařízení" které si teď tréningově zopakujeme :
ABSOLUTNĚ ZAKAZUJU POUŽÍVAT I2C MIMO JEDNOTLIVÉ DPS A I NA DPS NE NA VĚTŠÍ VZDÁLENOST NEŽ 5 CM!!!
Tušítě proč ? Přesně k tomu totiž bylo I2C vymyšleno - aby usnadnilo routování desek televizorů na dálkové ovládání v 80 letech. tehdy spojovalo přijímač IR, kanálový volič, a ještě "ten třetí šváb", který nastavoval analogové parametry jako hlasitost, výšky basy, kontrast, a barevnou sytost. - Nic více - žádné tahání kabelem na metry daleko, kolem motorů.
Tím samozřejmě vyvstala myšlenka vymyslet něco jiného - a tak jsme dělali "
brainstorming mailem". Já jsem křičel - "
vymyslete cokoliv, ale ať je to diferenciální sběrnice", kvůli odolnosti proti rušení. Bezstarosťák křičel "
hlavně ať to není RS 422 / 485" - protože tam se musí předem přepínat vysílání / příjem. Tak nakonec vznikla idea na
RobBus - použije se hardware pro
CANbus, ale budeme používat vlastní protokol:
RobBus by nikdy nepřekročil práh "
kecání na Internetu", kdyby se jí nechytlo duo Kamil + Beřich kteří ji dotáhli do stádia, kdy jí používají ve svých robotech.
Potud lze
RobBus považovat za ověřenou "
hotovou věc". ´Já jsem už byl mnohokrát nalomen jej taky použít (všechny moduly z mé dílny jsou z hlediska hardwaru připraveny), ale ať jsem počítal jak jsem počítal - pořád mi nevycházela přenosová kapacita, zejména s ohledem na moji ideu posílat ze sonarů do PC celé "
mapy ultrazvukové odrazivosti". K tomu směřovala i snaha o naprogramování
jednoduché ztrátové komprese atd. Robbus je totiž z principu Simplexní / Poloduplexní sběrníce a navíc "
všichni slyší všechny" včetně toho, že každý modul "
slyší sám sebe" - což třeba převodníkům USB / RS232 pro PC nedělá 2x dobře.
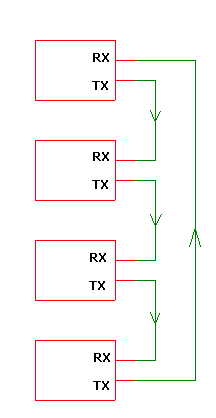
Tak jsem přemýšlel nad "procesorovými sonary" kdy kažý mikrofon bude mít vlastní procesor, který udělá preprocesing. Vymýšlel jsem Robbusové SWITCHE a HUBy a pořád mi z toho vycházely věci - více méně monstrózní. Mezitím jsem přemýšlel nad tím, jestli by nestálo za to Robbus úplně opustit a místo něho se vrátit k RS 232 (a obětovat robustnost diferenciální sběrnice). Vymýšlel jsem jak spojit více RXD a TXD pinů navzájem až najednou PINK - sedím ráno na záchodě a "je to tady".
Nejsou přece jenom sítě typu "sběrnice" nezanedbatelnou část historie se používaly sítě typu "kruh". Dodnes se používá SPI, z historie je známý Token Ring, nebo ARCnet. Takže idea je následující - data se po sběrnici nešíří pasivně, ale aktivně, každý modul dostane paket, co potřebuje si ponechá a zbytek "přepošle" dál. Master se navenek chová stejně, akorát místo neustálého kroužení starého packetu - nahradí tento novým. Tohle může fungovat na úrovní packetů, ale z hlediska softwaru i propustnosti sběrnice je lepší tohle dělat na úrovni bytů. tím že kruh je tvořen full-duplexními úseky komunikační rychlost celé sítě modulů rovná se rychlosti komunikace s jedním modulem. S počtem modulů roste zpoždění mezi vysláním dotazu a přijetím odpovědi, ale u praktického počtu modulů v robotech ( do 10 ) by se s tím (snad) dalo žít.
V čem může být nevýhoda - jedná se o sériové spojení v pravém slova smyslu - tedy vypadne vám odněkud konektor a je po ptákách. Proto zase pro změnu přemýšlím, že "hlavní rozbočovač" by měl nějakou detekci této situace. Na druhé straně master má schopnost detekovat že se packet nevrátil....
Nevím nevím - nabízím tuto ideu jako myšleku (jistě už známou všem zkušeným) - jak pomocí UARTu spojit více než dva moduly. V ostatních oblastech je to stále ve stadiu spekulací aneb jak říkal
Doktor FAST - "
kdo nejvíce - myslí nejméně ví" ...
Tedy idejí bychom měli dosti - zbývá ještě tradiční rada pro blondýny : Víte jak dopadla moje exmanželka ? Po 10 letech a dalších 2 dětech se svalovec z fitka sebral a šel "o dům dále" - za blondýnou v minisukni - takže pozor ! "Lehce nabyl - lehce pozbyl" funguje i této oblasti.
15. května 2014 v 4:38 | Petr
Opravdu jsem už dědek, protože jsem docela aktivní na stránkách
www.robodoupe.cz. včetně jejích
fóra. Právě z toho fóra mi došel mailem dotaz jak je to s pneumatikami pro roboty, aby neklouzaly. Opravdu nevím jak tazateli odpovědět přímo, ale on sám měl ten geniální nápad, abych otázku přilnavosti pneumatik pojednal v blogu, který prý čte. Takže jako obvykle začínám ze široka.
V roce 2005 jsem svého prvního procesorového robota předváděl na robotickém dnu v hale na Smíchově v kategorii volná jízda. Byl jsem na něj hrdý jako hrom - měl jsem ručně dělané převodovky, infračervená čidla všude kolem dokola. Jeho úlohou bylo motat se mezi lidmi a nenechat se chytit (nenechat na sebe šlápnout) což dělal opravdu dobře, protože nakonec za ním běhal hrozen děcek předškolního věku a řvali jako indiání.
A pak nastal
Moravcův paradox v praxi, protože místo obdivu k mé IR radiolokoaci a celkově velmi biologicky vypadajícímu chování jsem slyšel maminu jak děťátku se značným despektem vysvětluje - "
utíkat umí naše kočka taky". Takže projevem konstrukční nedokonalosti je, když se robot nechová jako robot, ale chová se jako kočka - vidíš blbe ....
Takže jsem věděl, že od příštího roku chci soutěžit v nějaké objektivně měřitelné discipíně a hned se naskytlo Mini-Sumo. V té době se roboti motali po hřišti a většinou něměli tuchy, kde je soupeř. Takže jsem vymyslel něco zcela jiného - dodnes si myslim, že jsem do SUMO robotiky přinesl dvě věci
- Navigace na hřišti, aby i slebý robot trefil na střed a nemotal se u kraje - což jsem popsal v tomto článku.
- Stereofonní ultrazvuk.
Zejména stereofonní ultrazvuk způsobil vlnu zájmu, protože pod dojmem z ubohých Čínských sonarových modulů nikdo nevěřil, že lze mětřit vzdálenost kratší než 10-20 cm a už vůbec nikdo nevěřil, že z rozdílu levého a pravého kanálu lze získat azimut k soupeři. Ač technologicky nejvyspělejší robot - přece jsem nevyhrál. Lépe řečeno jsem "
Vyhrál" zvláštím způsobem - to jest měl jsem stejně bodů jako vítěz, ale
prohrál jsem s vítězem vzájemný zápas.
Princip byl totiž v tom, že mechanická konstrukce mých robotů a vítězného "
Modráska" byla naprosto stejná - modrásek ale měl silikonové pneumatiky, zatímco já jsem používal starší styl pneumatik z gumových rukavic. Dokonce před vzájemným zápasem mi Pepa Hanzal - konstruktér Modráska a
prodejce robotických komponent - nabízel, že mi silikonové pneumatiky prodá - hrdě jsem odmítl, protože přece nebudu "
technologickou převahu" svého robota narychlo kazit nějakými pneumatikami.
Tím jsem nabyl dojmu, že už chybí jenom silikon k dokonalému vítězství mé technologie. Tak jsem koupil několik párů silikonových pneumatik a v roce 2007 jsem byl presvědčen že si "
jedu pro vítězství". Jenomže nejenom moje snonary byly netradiční - vyskytl se člověk - jestli si pamatuju byl to Pavel Havajík, který šel ve zjednodušování SUMO robota do extrému. Jeho robot SAMSON byl něco, co jsme ještě neviděli - 400 gramů olova a palice, která se točí kolem dokola. Takže každý soupeř si pro Samsona dojel a byl nemilosrdně vyhozen s ringu, protože Samson měl na spodku 10x10 cm něčeho, co nám Pavel odmítl odkrýt, ale říkal tomu "
zelená hmota". A jak tušíte, tak žádná pneumatika pro Mini Sumo nemá 10x10 cm styčné plochy s podložkou a navíc statické tření je vždy větší než dynamické - takže jsme neměli šanci.

Tak jsem podnikl jistou špionáž a zejména jsem si jeho roboty dokonale vyfotil - abych určil co, to je "zelená hmota" - dodnes tuším, že to byl nějaký dvousložkový silikon / polyuretan - snad na těsnění bazénů.
Tím jsem však definitivně přišel na to, že SUMO není o hlavě, ale o "svalech" a tak jsem se rozhodl postavit "anti-samsona" a tím se se SUMO robotikou rozloučit. Výsledkem byl robot Ferdík, kterého dodnes popisuju jako "robotem obestavěnou devítivoltovou baterku". Jeho "anti-samsonovitost" spočívala ve třech věcech
- Výška jenom 33 mm a klinovitá příď
- Z 500 gramů bylo 390 v železných kolečkách.
- Přece jenom jsem ze Samsona měl trochu strach tak jsem naprogramoval - anti samson mode - pokud se robot postavil tak aby byl oběma spodními čidly na bílém kraji arény - tak udělal nutné minimum aby nebyl diskvalifikován - to jest otočil se a trochu pojel a pak čekal a pípal si k tomu - smyslem bylo uhrát se Samsonem alespoň remízu a "nedat mu body".
Ferdík fungoval naprosto dokonale - Samson nad ním kroužl svojí palicí a Ferdík jej předním klinem "odlepil od podložky" a vyhodil ven - stejně jako všechny ostatní soupeře - takže vyhrál v roce 2008, 2009, i 2010 a pak jsem se domluvil s organizátory že končím, abych neodrazoval mládež.
Teprve teď se dostáváme k otázce přilnavosti pneumatik - jsou tyto možnosti.
- V pradávných dobách jsme koupili zelené gumové rukavice ustříhli z nich prst a ten přetáhli přes kolečko robota (i ve více vrstvách - rukavice má 10 prstů), spolu s neustálým číštěním lihem, nebo benzínem - se prst stal nakonec celkem lepivým - přesně toto stačilo do roku 2006 než se objevily:
- Pepy Hanzala silikonové pneumatiky.
- Záhadná zelená hmota Pavla Havajíka
- Řešení alá "Ferdík"

U toho se zastavím podrobněji, protože s tím nemám žádné tajnosti. Prostě jsem šel do železářství, kde naše Frýdecká firma
Soudal měla vzorník silikonových tmelů a lepidel, které nabízí. Jistě to znáte - je to takový veliký tuhý kartón, na kterém jsou přilepené "
ďubky" lepidel, které vypadají jako miniaturní psí hovínka. Tak jsem hmatal a hmatal a hledal jsem, který silikon je nejměkčí - a vyhrálo to nějaké silikonové lepidlo, které stálo tehdy astronomických 275 kč, zatímco obyč sanitární silikon byl tak za 90. Vtip je v tom, že už jsem stejné lepidlo u nich nenašel - takže budete muset jít a sami si "
omacat" vzorník někde v Bau prodejně. Měkkost silikonu je zásadní - musí to být hmota "
měkká až lepivá" ať už je výrobcem určena k čemukoliv.
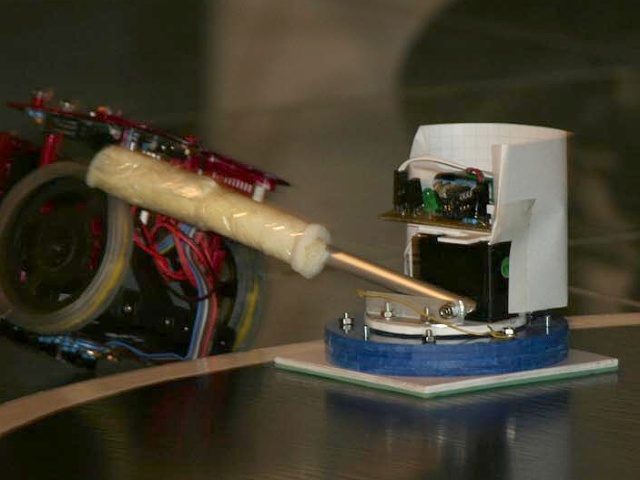
Pak byl s Ferdíkem ten problém, že měl speciálně udělaná kolečka - která jsou vlastně vysoustružené plné kusy chromové oceli - velmi těžké. Proto taky nemohu na Ferdíka zveřejnit návod, přestože jinak je to robot prajednoduchý postavitelný i malým děckem.
A poslední problém jak na kovová kolečka nanést vrstvu silikonu. - to jsem dělal tak, že jsem Ferdíka už hotového umístil na záda a přišrouboval k desce. asi 3 mm od ještě "holých" železných koleček jsem přišrouboval stěrku z pěkně do hladka opracované a mýdlovou vodou velice namydlené dřevěné desky. Pak jsem nechal kola točit a postupně jsem nanášel "housenku" z lepidla pěkně zleva doprava a zpátky až se začala vstva otírat (a uhlazovat) o mokrou stěrku. Nakonec jsem - za neustáleho točení - povrch uhladil namydleným prstem - a bylo. Stejně jsem něměl povrh tak pěkný jako litý polyuretan Pavla Havajíka, ale co - k vítězství to stačilo.
Zde na obrázku vidíte jak jsou ty pneumatiky celkem hnusné - částečně už od novoty. Částečně množstvím zápasů. Zároveň vidíte proč si proti "hrdinovi Ferdíkovi" už nezahrajete - po létech věrných služeb spadl na zem a váha koleček vylomila obě převodovky.
Než skončíme jenom praktická poznámka - "přilnavé pneumatiky" - jsou bohužel přilnavé i pro smetí a prach - zvykejte si proto koupit spoustu lihových ubrousků na ruce a před každým kolem každé soutěže pneumatiky vyčistit a nechat líh uschnout. Extrémisti ( a chemici) mezi námi mohou čistit třeba Izopropylalkoholem - taky jsem to tak dělal, ale smrad za to nestojí a lihové ubrousky nakonec na soupeře vždy stačily.
Tedy to je nadobro všechno, co o těchto věcech vím, zbývá už jenom tradiční rada pro blondýny - když máte nutkání koupit si psa - ať to není Yorkšír, nebo Čivava, která s růžovou mašličkou poleze z vaší růžové kabelky - tito psi - takto chovaní - přímo křičí - jsem tak blbá, že je nebezpečné opřít si o mně i kolo !
10. dubna 2014 v 5:33 | Petr
Když robotik čte modelářský časopis - nemůže se ubránit jistému pohrdání - pchá - "špejličkáři", co z pěnovky, horkým drátem, vyřezávají letadýlka. Nicméně čím jsem starší - tím je tento pohrdavý postoj slabší a pokud vídím chaos současné "hobby robotiky" tak nemohu než žasnout nad průhlednou jednoduchostí a obdivuhodnou vzájemnou kompatibilitou současné modelářské elektroniky.
Tedy každý robot má čidla, mozek, motory. Každé polystyrénové letadlo nemá nic z toho jenom (servo)motory. Čidla a mozek má "páníček v hlavě". V době letadel "benzíňáků", které ve skutečnosti lítaly spíše na methanol a nitromethan to byla 100% pravda, ale pak se v leteckém modelářství objevil elektrický pohon, s elektrickým pohonem se objevily helikoptéry, trikoptéry, kvadrokoptéry, hexakoptéry a jiné multikoptéry a najednou se obrovská propast mezi složitostí robotů a primitivismem "letadélek" začala stírat.
Jak tedy vypadá taková multikoptéra - protože lidské reflexy nestačí na to, aby se taková věc udržela ve vzduchu - je na palubě počítač - často s AVR nebo nějakým menším ARMem. Tomu dodáva data "inertial navigation unit" což v dnešní době je miniaturní jedno až dvoučipová deska, která obsahuje tříosý gyroskop, velmi často i tříosý akcelerometr a občas i tříosý magnetometr - jako kompas. ARM dodává data do motorů a jenom "tak pomimo" tam sedí i příjímač dálkového ovládání vysílačkou k jehož povelům ARM "přihlíží" při řízení všech vrtulí.
Jak tedy vypadá robot ? neuvažujeme - li chudáka, co tahá na zádech izolepou přilepený laptop - tak téměř stejně jako multikoptéra - pár desek s AVR / PIC / ARM, čidla , motory, často i dálkové ovládání, k jehož povelům procesor "přihlíží".
Podstatný rozdíl je ale v tom, že zajdete do modelářské prodejny a koupíte "servomotory", hlavní motory, přijímače, akcelerometry, gyroskopy, mixéry, telemetrické moduly, a já nevím co ještě. Od Štědrého dne do Štěpána to sestavíte dohromady a na Nový rok můžete letadélko jít na louku rozbít. (Téměř) všechno totiž na sebe sedí - vše je spojeno třípinovým "futaba konektorem" a "fuguje ihned po zapnutí".
Naopak pokud pokud máte ambici postavit tímto "nakupovacím způsobem" robota velice spláčete nad výdělkem, protože koupíte milion zcela mrtvých modulů, které si musíte naprogramovat sám, od vánoc až do léta se budete topit ve zdrojových textech stažených z internetu a budete propadat naprostému zoufalství kolik v nich bude řádečků typu
;TODO sonar sensor support not implemented yet
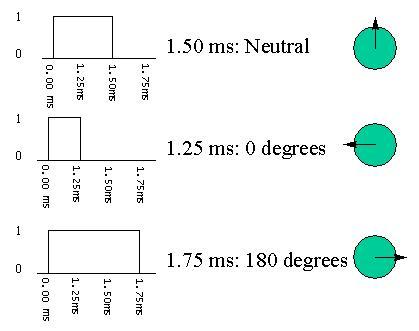
Princip snadnosti modelářské elektroniky je totiž v tom, že její základ "futaba konektor" a "protokol" který tento konektor přenáší se táhne někam do velmi dávné (a temné) minulosti - někam k elektronickému řízení protiletecké palby ve 40 letech a k řízení balistických raket v 50 a 60 letech.
Vlastně jediný standardní "modelářský protokol" je "servopuls" - po datovém drátě futaba konektoru se 50x za sekundu prožene puls jehož délka určuje polohu serva 1,5 ms je střed. Zprostředkovaně vlastně tento puls může přenášet (a v elektroletech a multikoptérách i přenáší) jakoukoliv číselnou hodnotu.
Zdá se vám to primitivní ? Takový "
mixér výchylek" ale zase tak primitivní není - do něj vstupují dva "
futaba konektory" - řekněme
výškovka a směrovka. a ven lezou
2 servopusly pro "V-tail" - mixér tohoto typu pak realizuje rovnici
Levý V-tail = výškovka + směrovka
Pravý V-tail = výškovka - směrovka
Zdá se vám to málo ? Piště si, že je to dosti a hlavně - za 30 let bude stejný mixér z letošní sezóny fungovat stejně dobře a nekomplikovaně jako funguje dnes - vysoce pravděpodobně i s budoucím vybavením...
Když to rozebereme ještě podrobnějí - každý komponent typu "mixéru výchylek" se dnes realizuje pomocí mikrokontroléru, který měří délku přicházejících pulsů - s různou přesnotí obvykle 8 bitů ale dnes už i 10-12 bitů, tomu odpovídá i přesnost výstupu. To vypadá jako značná ubohost, ale díky primitivní jednoduchosti "servopulsu" se dají propojit komponenty, které od sebě dělí desítky let od doby vzniku, celá zeměkoule geografické vzdálenosti a původní konstruktér ani v nejdivočejších snech netušil k čemu budete jeho "dítko" chtít připojovat.
Pokud bychom my robotici chtěli "reformovat letadélka" - první problém, který by vznikl by bylo - "čím nahradit servopuls". A z toho by vyplývaly další problémy - jako jsou různá "overengineered" tedy "překonstruovaná" řešení. Takže nakonec by "letadélko" skončilo jako monstrum kde data z příjímače by šla přes WIFI , Ethernet, USB, RS485, CANBUS, všude by bylo milión modulů typu "překladač protokolu" a v softvéru hlavního mikrokontroléru by bylo
;TODO točení vrtulí zatím není implementováno....
Proto koupit "letadélko k vánocům" je dětsky snadné a závislé jen na množství pěněz. Zatímco koupit "robota k vánocům" je složité, protože buď koupíte zcela uzavřenou čínskou "hračku pro imbecily" nebo za veliké prachy koupíte polotovar s malou šancí jej rychle zprovoznit.
Vážení robotici - moc se nečilte, a raději přemýšlejte, jak vymyslet něco tak geniálně jenoduchého a nadčasového jako je "
servopuls na futaba konektoru", a vyhnout se při tom mrtvým vodám "
čtyřdírkového systému"
Pro dnešek končíme - zbývá už jenom oblíbená rada pro blondýny - sice platí - "v dubnu si musí blondýna vrznout, i kdyby jí měly vaječníky zmrznout", ale ráno je pořád chladno - tak tu déku (mini)sukní ještě jednou promyslete.